Outcome / Challenges
I created 2 models for the data I captures:
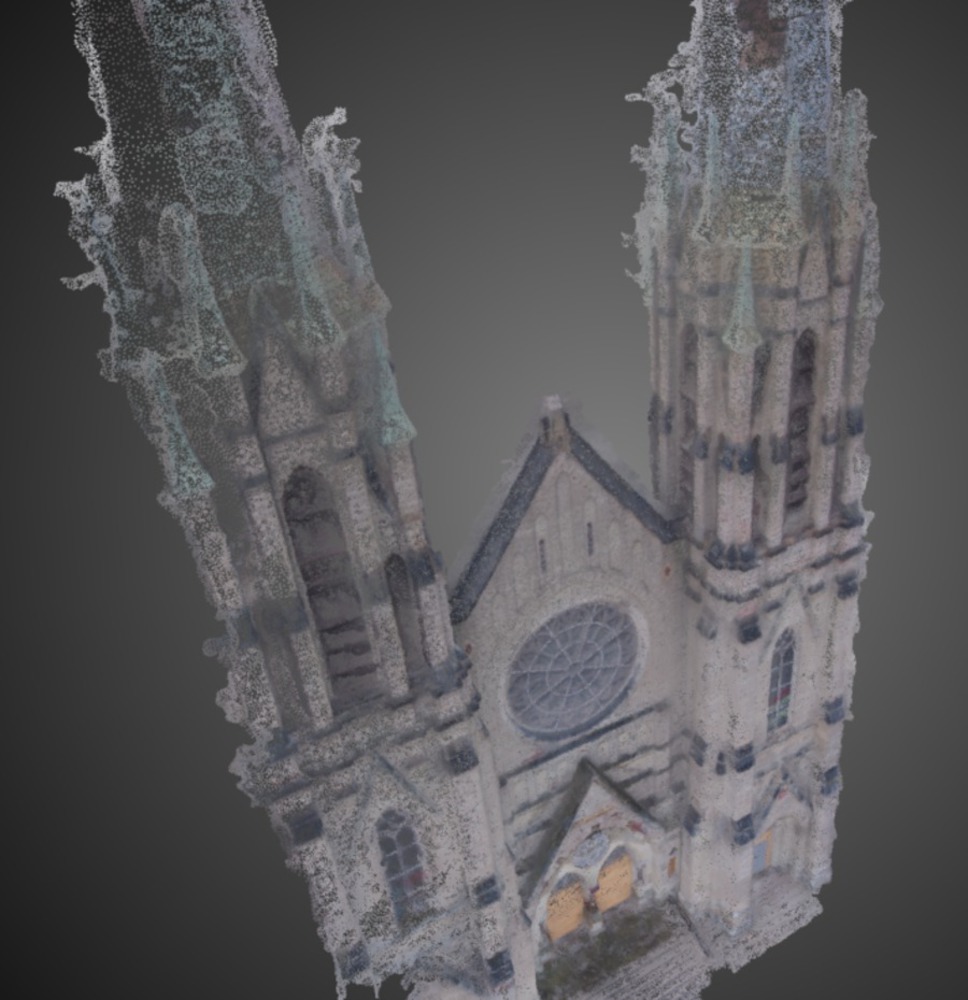
- a model of the church façade, including point cloud and mesh data
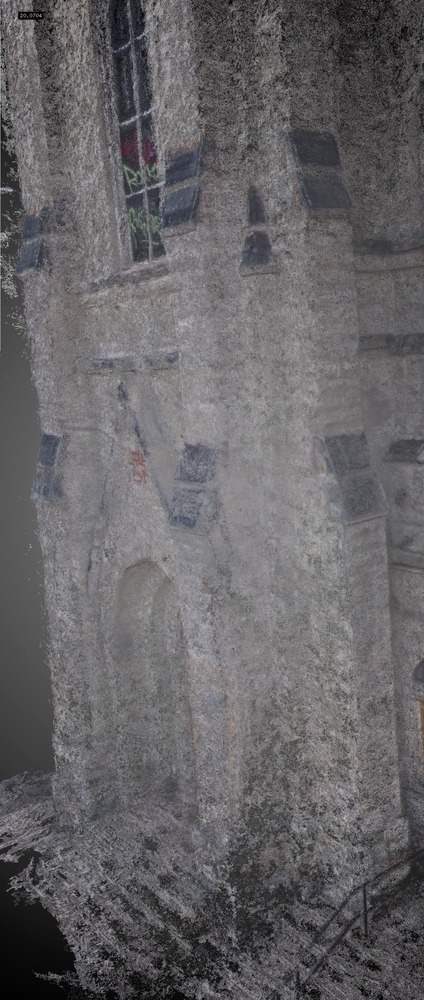
- a model of the abandoned school I shot including point cloud and mesh data
Finally, I output the models in OpenFrameworks using relatively basic code for loading 3D models. The gist of the OpenFrameworks code I used is below.
Challenges:
1. Flying a drone
I started flying with the Parrot drone, a cheap, starter drone which is quite hard to fly because one has to fly it through a mobile app. The touchscreen controls give you very little feedback about the drone movement itself. I then upgraded to the DJI Phantom 1 - a model without a camera - to become familiar with the physical controls typical of most drones.
Finally, I picked up the DJI Phantom 2 Vision - a model with a high quality camera - and started shooting. The Phantom 2 can fly higher than 400 feet! Though 400 is the legal limit in most countries. The reason its so easy to fly (with a bit of practice beforehand) is that the drone locks on to at least 6 satellites and flies in a semi-automated GPS mode. Even if you let go of the drone's controls, it will stay within a cubic volume of about 2x2x2 meters - even with high winds.
2. It should come as no surprise that drones are increasingly being regulated. I think anyone that has flown one can agree that this is good news. They *can* be dangerous that's why a good rule is to never fly over other people. I found it quite challenging to find a safe, quiet place to fly where I wasn't stopped by police or kicked out (the parks!).
3. Because of the scale of the church and school that I chose to capture, I had to fly multiple missions to capture sufficient footage. During post processing, my photo chunks weren't aligning properly even though I was supplying GPS, yaw, roll, and pitch data about the drone's location and position for each image. After a few experiments I realized that in fact they aligned better *without* that data (i.e. performing a pure alignment based on the features in the images) for what I believe to be a simple reason: since there is a margin of error in the GPS and other outputs, I should NOT have callibrated in between flights of the same building. The calibration changed what the values meant in absolute space.