Speculative Proposal / Conceptual Design
The big idea of our proposal is to build the interior structure of an independent mobile biome for plants with self-leveling and adjusting system and artificial light system. We want to take a step forward, to create an experimental ecosystem and mobile lab that can achieve self-maintenance for 18 months as well as to provide sufficient data for researches of plants living conditions on Mars and exploration of Mars surface.
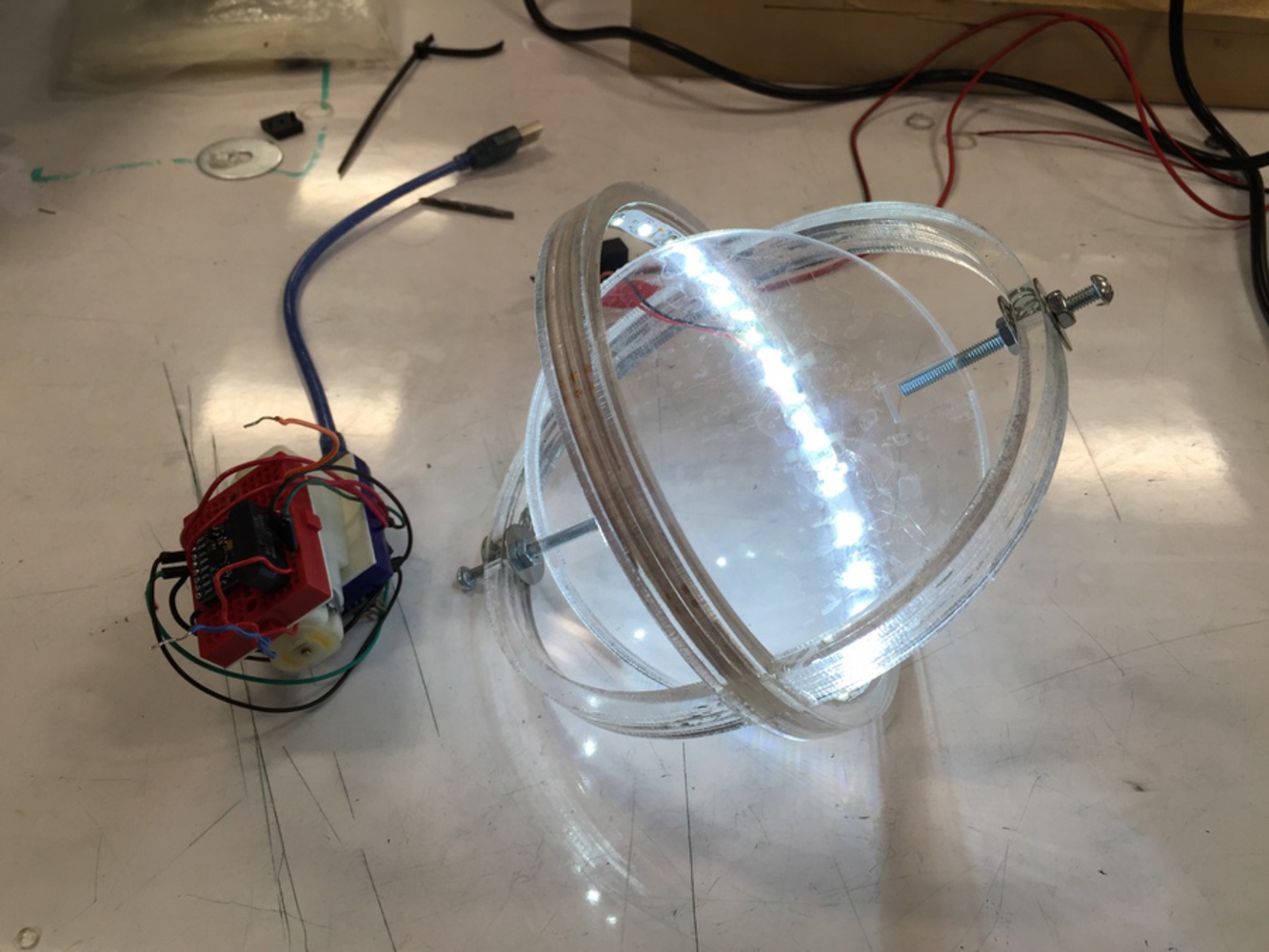
Prototype
What we built was a global structure with gear DC motor that could control the tilting degree of plant platform. For the global structure, we used Solidworks for specific design, laser cutter to prototype then put all the parts together with hot glue gun. For the motor part we used Arduino nano to control the gearhead DC motor which should be attached to our plant platform to achieve the self-leveling feature. As for the artificial lighting system, we had an LED strip around the interior of the structure. Two springs are built into the connection joint between the plant platform and the globe structure, served as shock absorbers.