Product
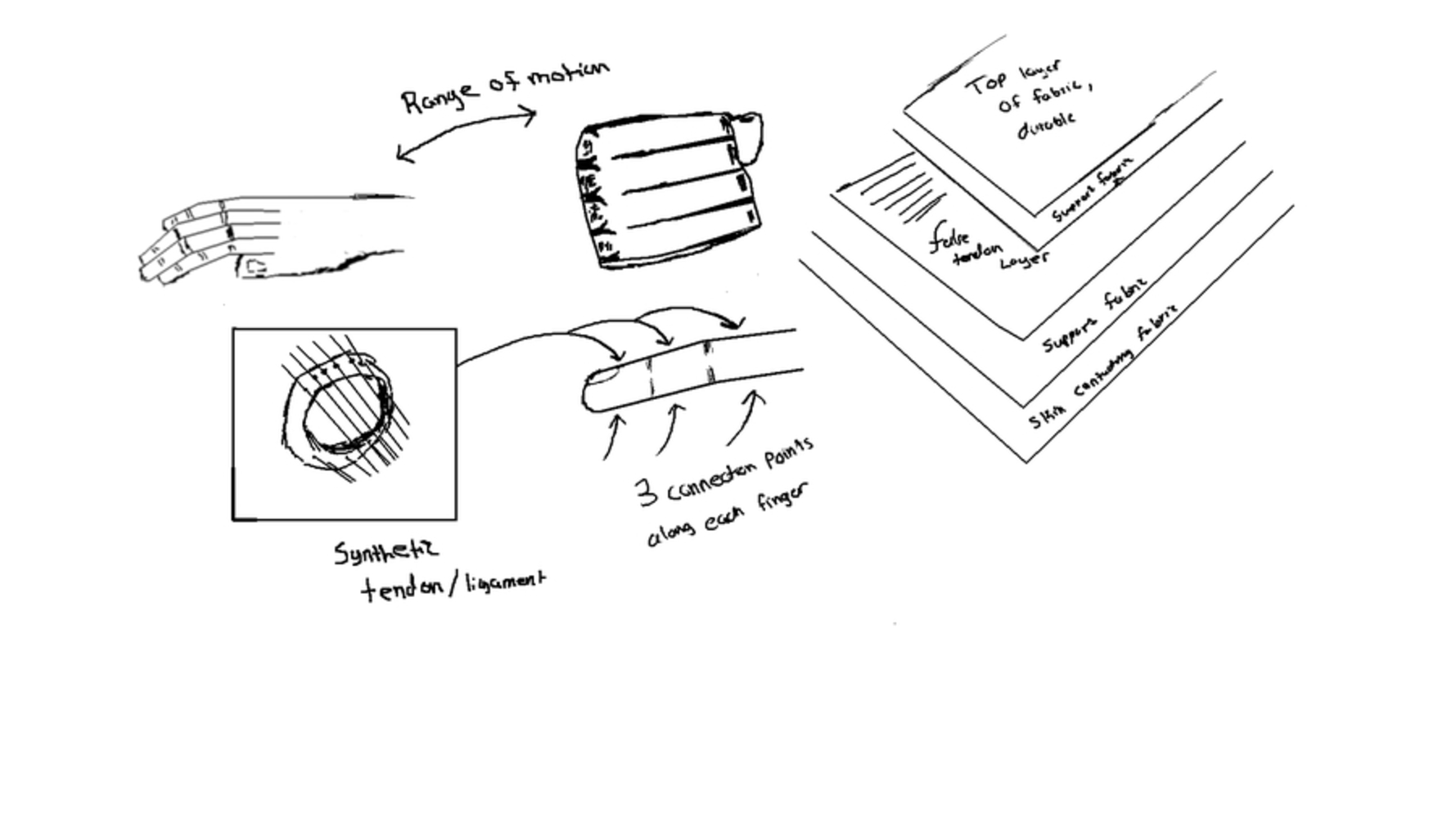
I had to consider what the best way to implement this would be. I
would need to try and create a synthetic ligament. It would be possible
to create this type of resistive feedback with only a single one of
these synthetic ligaments attached at the tip of each finger, but the
range of motion that would be controllable becomes severely limited in
that design. For that reason I decided it would be best to have a series
of 3 ligaments along the fingers, and 2 for the thumb. These false
ligaments would be peaces of durable fabric which could withstand the forces required to actually control the motion of a human hand, with some for of synthetic fiber connecting each ligament to the base located around the users wrist.
In order to actually control the movement of the users hand, the base station would essentially reel in the fibers attached to each ligament. The fibers on the actual ligament sections are separated by threads which run along the top of the finger, and the threads which run along the bottom of the finger. In this way, we are able to control the maximum amount that a user can grip, but also move a users hand in those two directions when needed (think pressing your hand on a wall and rolling your wrist upwards).
The obvious concern with this type of device is safety. Should the base station begin to malfunction, if it were left unchecked, the user could be severely injured if the controller began to over tighten sections of the ligaments. This is the main reason why a device like this is best made out of fabric and the ligaments sewn as separate pieces of fabric. Not only can the fibers, which connect the false ligaments to the base station, be chosen to have a tensile strength such that they break in the event of extreme stress events, the actual threading which connects the ligaments to the glove lining could be sewn in such a way that it has the same effect as "break away" clothing.