
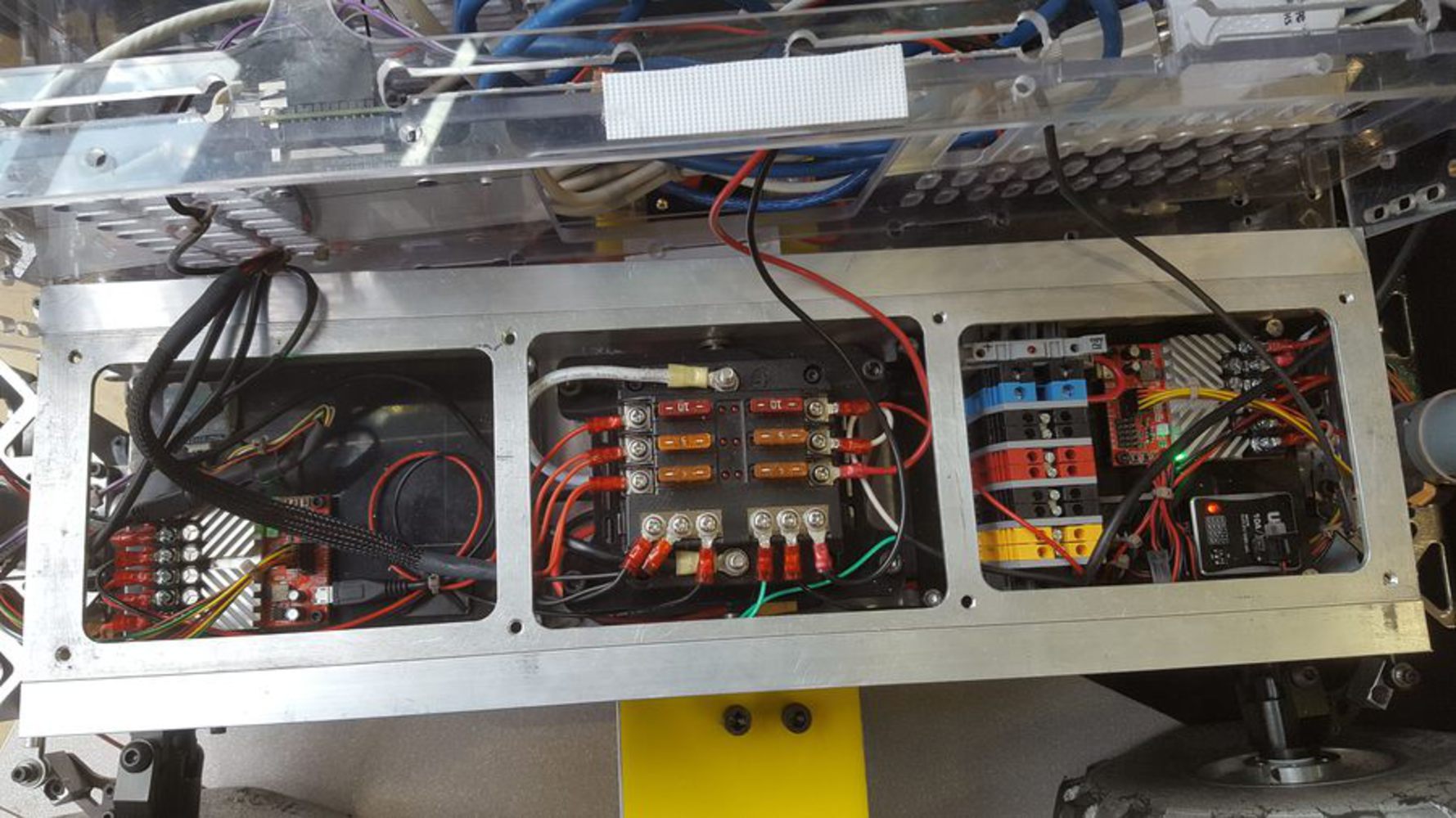
This project showcases the rebuild of the AutoKrawlers, two rovers I've worked on as a part of my Master's in Robotic Systems Development work. While doing my masters I faced a lot of issues with the electronics being unorganized, hard to reach, and in some cases unsafe because of their positioning and wiring. This project seeks to remedy that issue for future students and researchers working on the platforms. Pictured above is the final result. Pictured below is the removable covering when removed. showing the accessible components.
Outcome

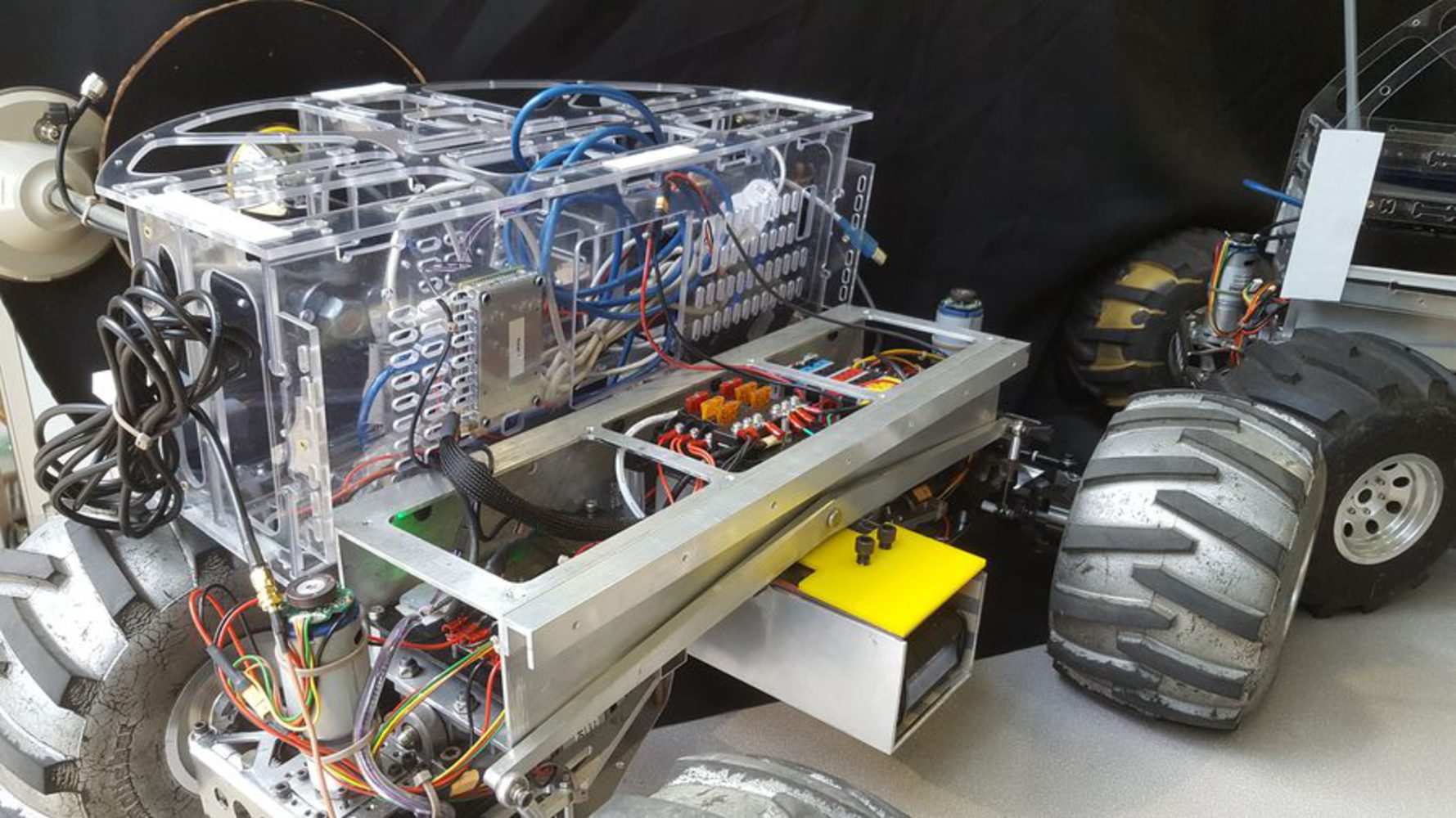
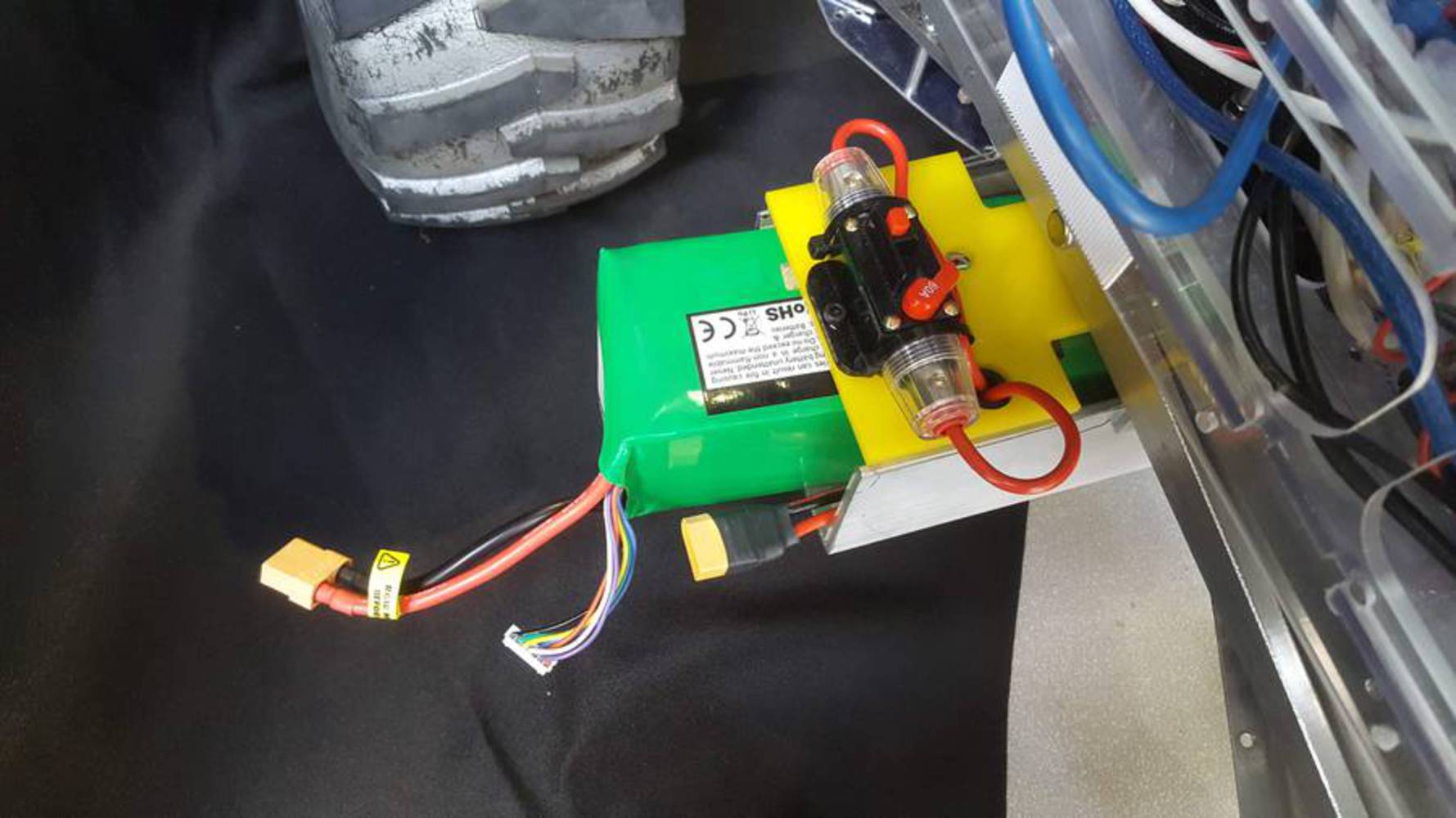
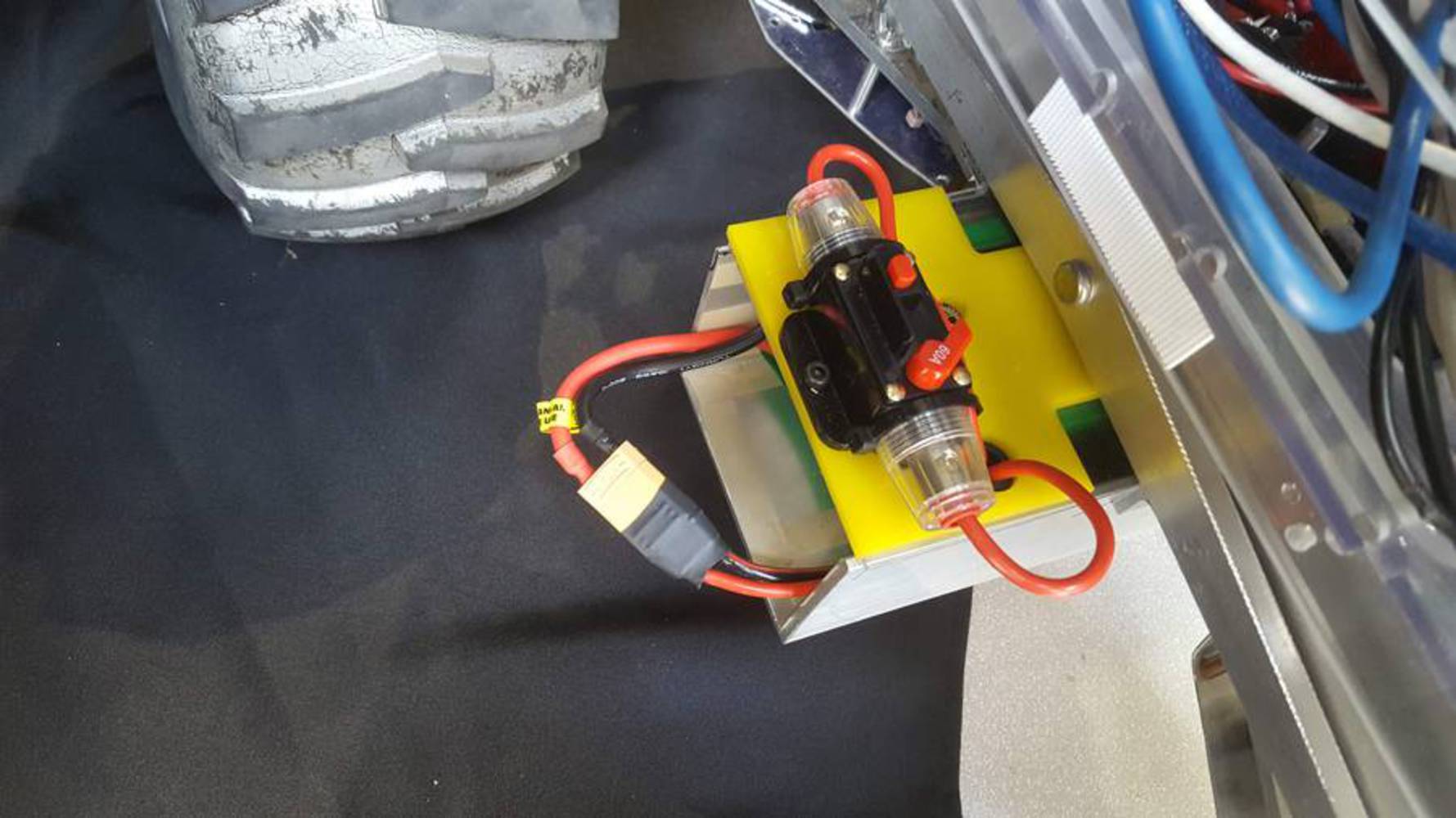
Above shows how easily the upper decks can be removed, all while the rover is still turned on and functioning. This makes the motor drivers and low level hardware easily accessible even though 99% of the time they won't need to be touched. The wiring has been tidied up and no wires are stretched when working on components. A fuse block was added to protect individual electronic components.

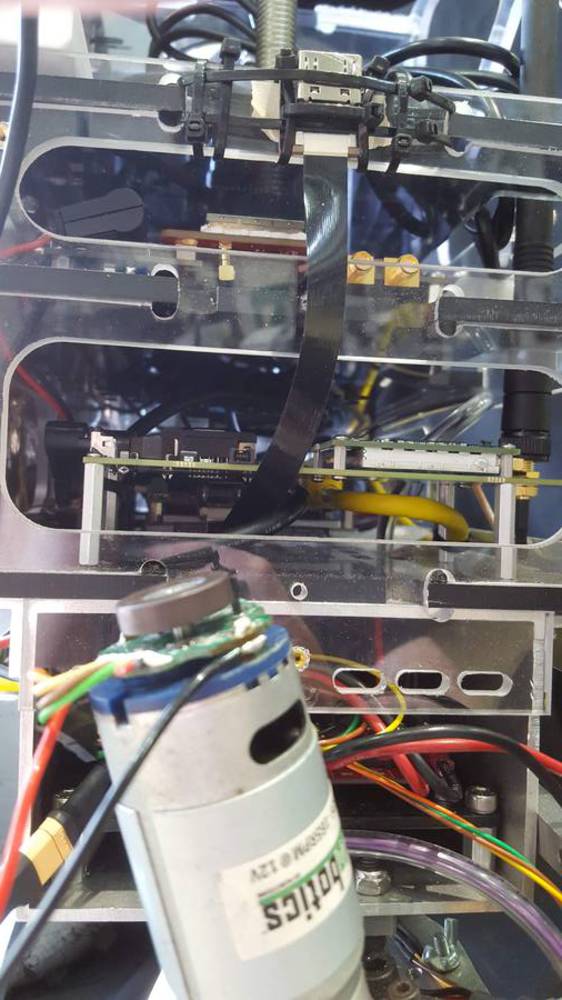
While testing the USB, Ethernet, and HDMI ports are often used, and have been made easily accessible through hubs and customizable ribbon cables and adapters. https://www.amazon.com/BLACK-Cable-Standard-Interface-degree/dp/B01M596VOC


You can upload files of up to 20MB using this form.