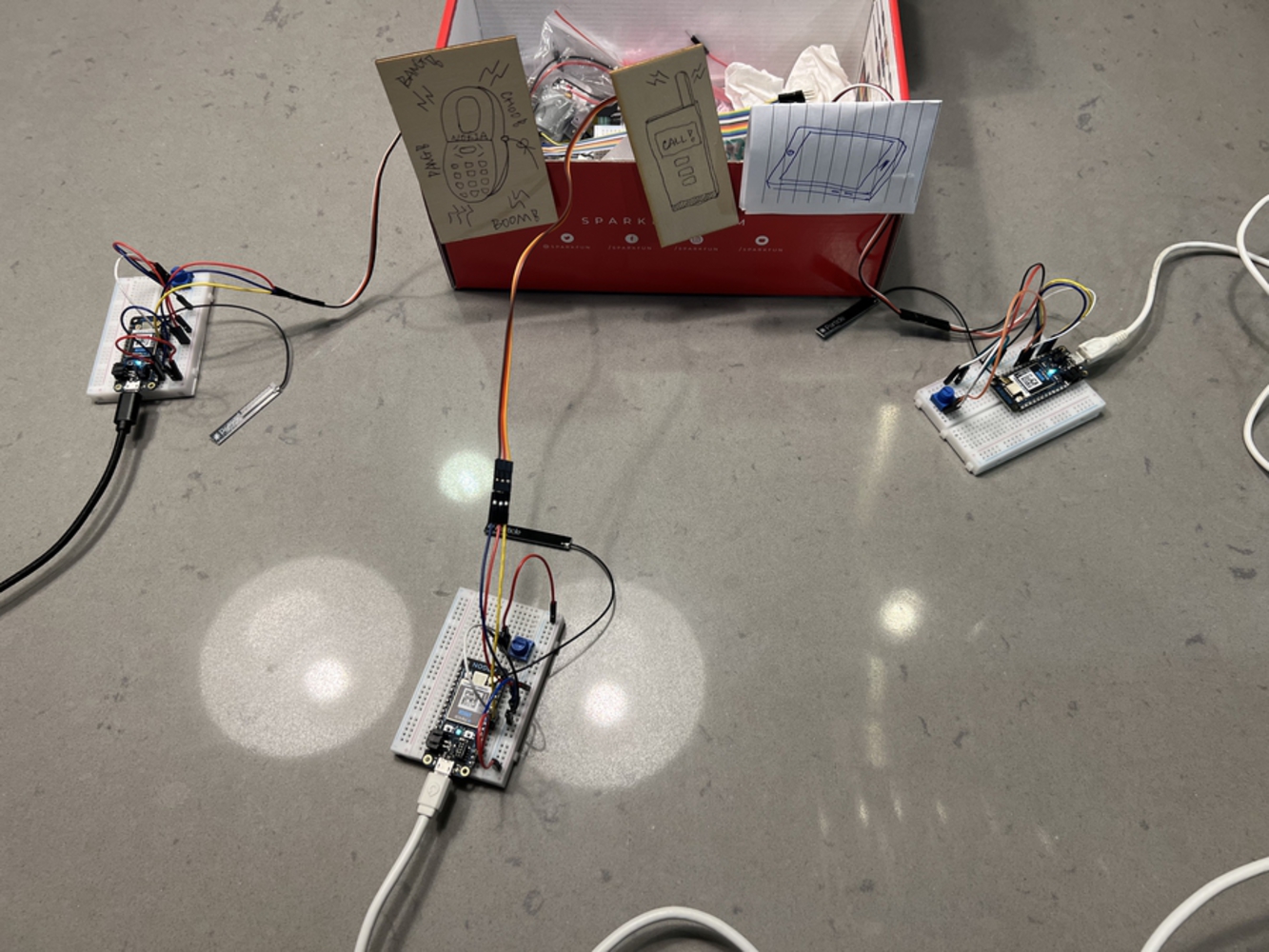
Started with prototyping the paired devices that can rotate a same degree with the output of a servo, we initially made the two phones vibrate together when any button was pushed, but we wanted to make this action more interactive, so we chose knobs that allow the user to control the servo more to their heart's content to convey more information.
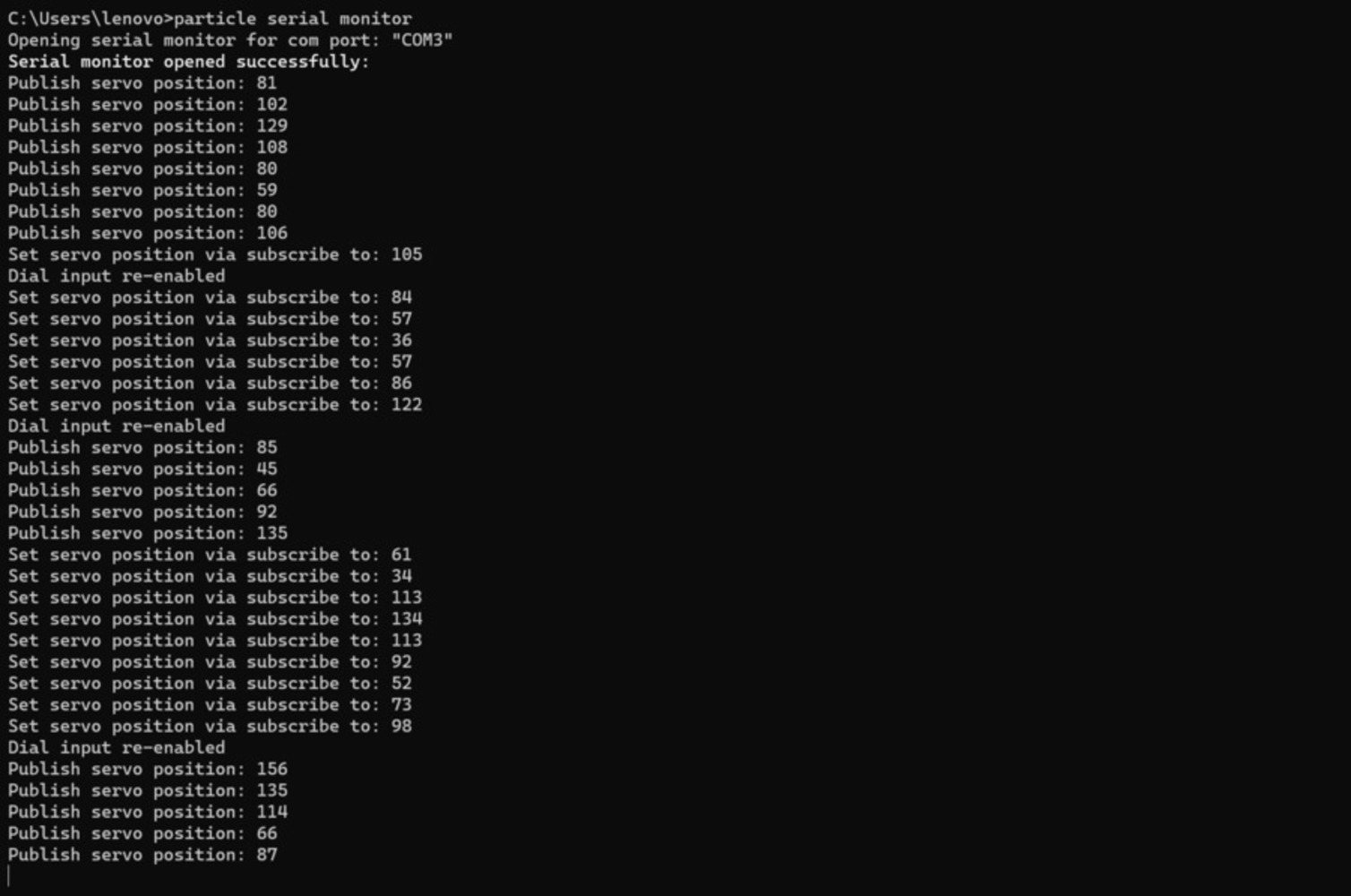
And then we add a dial to provide a more interactive reading for the project. During testing with the project we found that the reading of two dials on separate argon could trigger the servo to move back and forth, which is also a pretty intriguing pattern. If the mapped value of the dial match within a tolerance angle of 20, the two servo would be stable and static, but if the gap is bigger than that, they would send local reading value of the dial to each other and keep swapping that reading from the dial.
We thought that to control in terms of a loop of 3, it might be more effective if we only publish the pot reading to the subscription and avoid the duplication of a local dial reading as well as the reading from other devices.