Kinect Garden
Made by mcryan
Made by mcryan
Our project was an attempt at creating an intelligent environment that emulated the act of caring for another form of life.
Created: December 8th, 2017

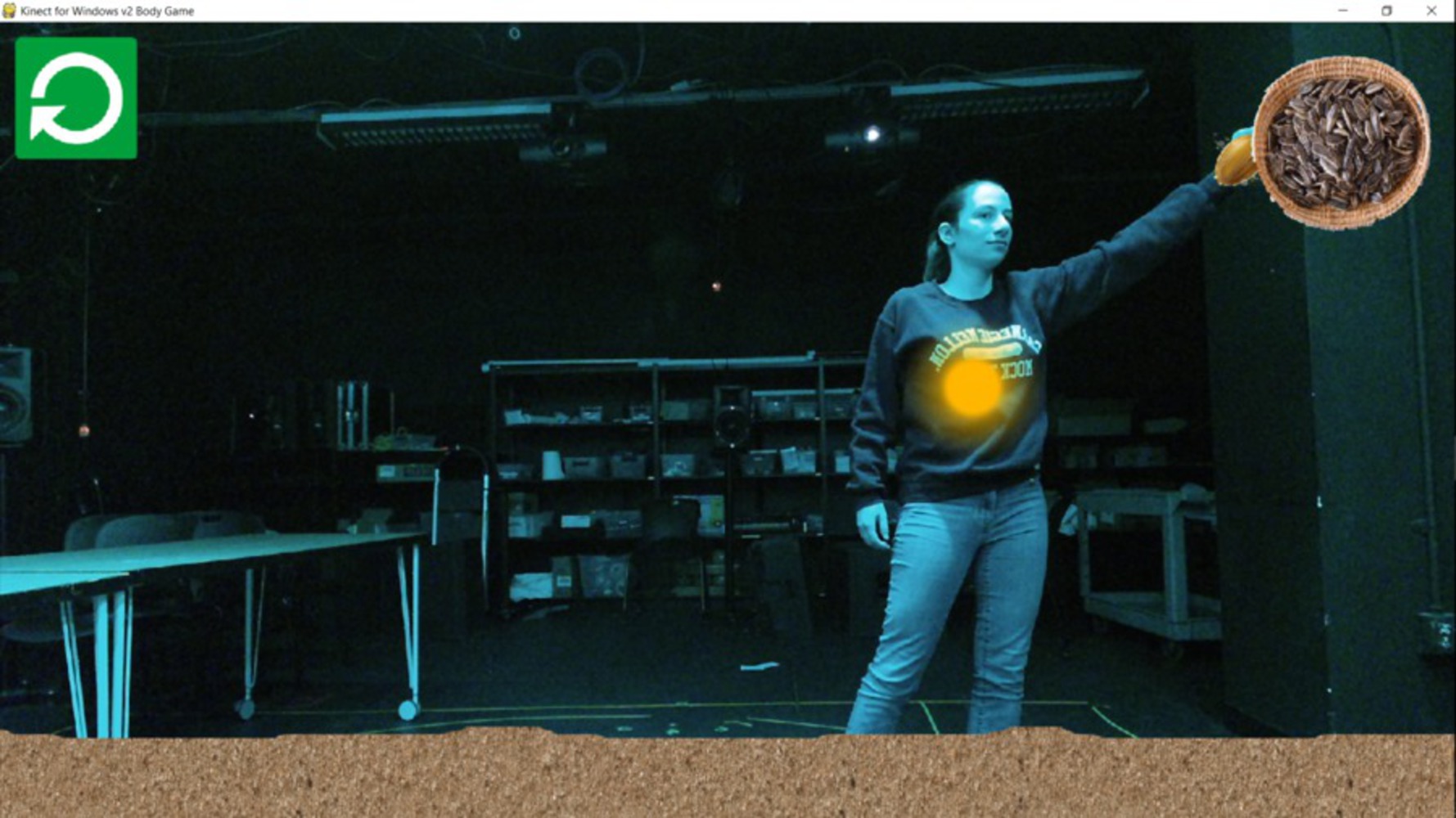
We used the Kinect V2 for Windows to create our environment. Once the Kinect recognizes a person, it places a Sun at their center. On the screen, there is virtual dirt, a basket of seeds, and a reset button as the interface.
The person grabs a seed by reaching up and making a fist in the basket.
For audio, we had outdoor sounds (wind through the trees, birds chirping, cicadas, etc) playing through speakers situated around the room, in an attempt to surround the user and block out noise coming from outside the room. Additionally, we turned on green lights overhead instead of usual indoor lights.
Rose
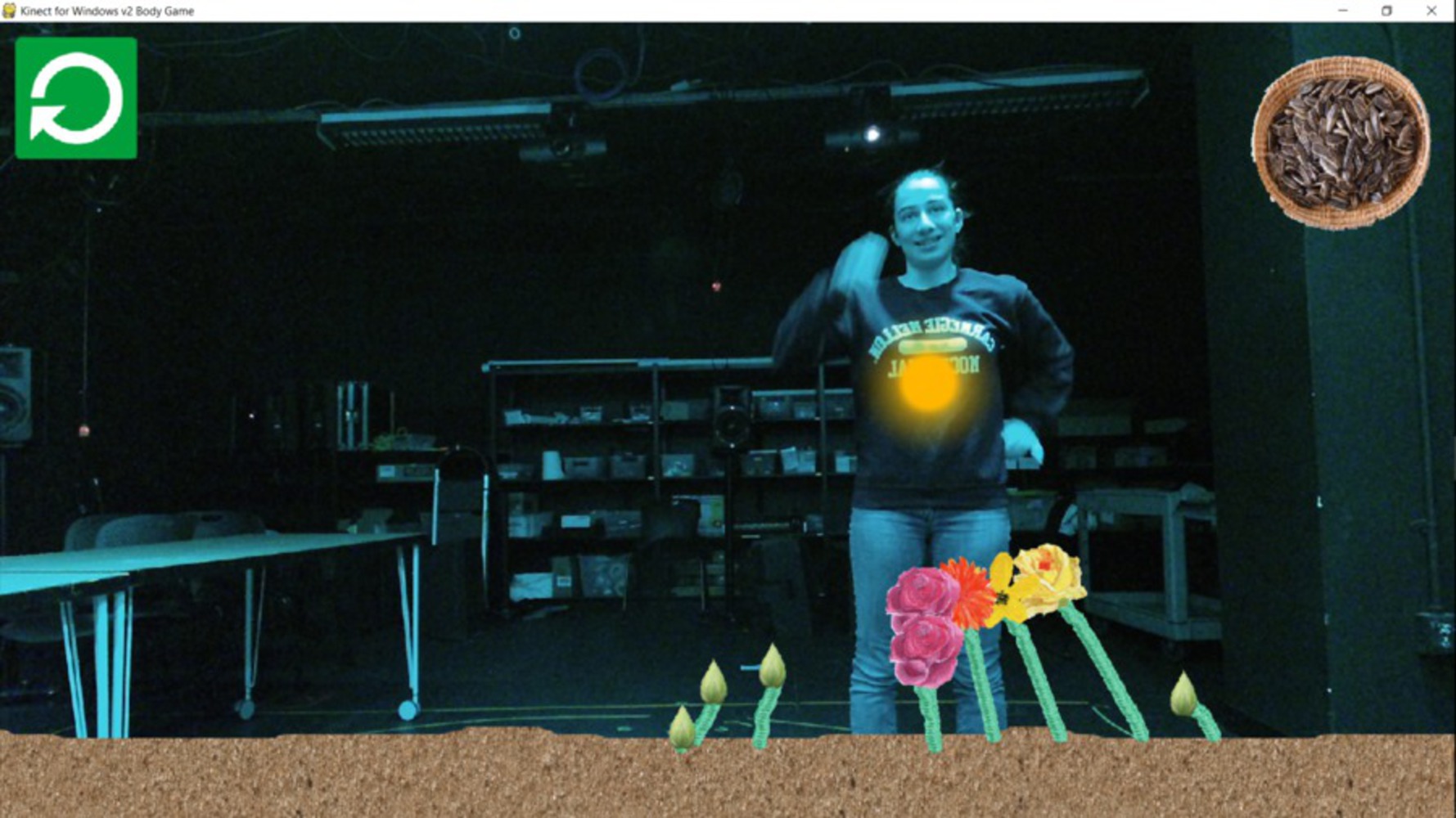
We were able to leverage the Media Lab to increase immersion in our environment, using both the overhead multi-colored lights and the surround sound available. These both added to our project in a way the Kinect was not able to. Additionally, the flowers growing toward the user was able to capture the reliance of a garden on the gardener -- it was clear and intuitive to understand.
Bud
Bringing more senses into our environment would have exponentially impacted our project. For example, we debated bringing plants to the Media Lab so that the user felt like our project extended beyond the projector. A reviewer also suggested bringing in bags of dirt so the smell would be present every time the user knelt to plant a seed in the soil.
Thorn
The Kinect is a difficult to beast to reign in, and our project was no different. There were glitches in our software, and its capabilities were limited. For example, our software couldn't handle more than one person in the frame at a time.
If we were to go further with this project, our first order of business would be to place some responsibility on the user. For example, some of the plants may die without the care of the gardener. We would also implement functionality where plants would fight for attention; overcrowding would become an issue, and the user would have to manage their garden accordingly.
from pykinect2 import PyKinectV2
from pykinect2.PyKinectV2 import *
from pykinect2 import PyKinectRuntime
import math
import random
import ctypes
import _ctypes
import pygame
import sys
import inspect
if sys.hexversion >= 0x03000000:
import _thread as thread
else:
import thread
class BodyGameRuntime(object):
def __init__(self):
pygame.init()
# Used to manage how fast the screen updates
self._clock = pygame.time.Clock()
self.count=0
self.planting = False
self.plants = []
self.stem = pygame.transform.scale(pygame.image.load("/Users/jon/Downloads/circle.png"), (20,20))
self.sun = pygame.transform.scale(pygame.image.load("/Users/jon/Downloads/sun.png"), (200,200))
self.reset = pygame.transform.scale(pygame.image.load("/Users/jon/Downloads/reset.png"), (200,200))
self.seedImg = pygame.transform.scale(pygame.image.load("/Users/jon/Downloads/seed.png"), (70,70))
self.basket = pygame.transform.scale(pygame.image.load("/Users/jon/Downloads/sunflowerseeds.png"), (300,300))
self.bud = pygame.transform.scale(pygame.image.load("/Users/jon/Downloads/flowerbud.png"), (70,70))
self.plantHeads = []
self.ground = pygame.image.load("/Users/jon/Downloads/soil.png")
for i in range(16):
self.plantHeads.append(pygame.transform.scale(pygame.image.load("/Users/jon/Downloads/flower"+str(i+1)+".png"), (100,100))) # Set the width and height of the screen [width, height]
self._infoObject = pygame.display.Info()
self._screen = pygame.display.set_mode((self._infoObject.current_w >> 1, self._infoObject.current_h >> 1),
pygame.HWSURFACE|pygame.DOUBLEBUF|pygame.RESIZABLE, 32)
pygame.display.set_caption("Kinect for Windows v2 Body Game")
# Loop until the user clicks the close button.
self._done = False
# Used to manage how fast the screen updates
self._clock = pygame.time.Clock()
# Kinect runtime object, we want only color and body frames
self._kinect = PyKinectRuntime.PyKinectRuntime(PyKinectV2.FrameSourceTypes_Color | PyKinectV2.FrameSourceTypes_Body)
# back buffer surface for getting Kinect color frames, 32bit color, width and height equal to the Kinect color frame size
self._frame_surface = pygame.Surface((self._kinect.color_frame_desc.Width, self._kinect.color_frame_desc.Height), 0, 32)
# here we will store skeleton data
self._bodies = None
count = 0
def update_objects(self, objs, xper, yper, speed):
for i in range(len(objs)):
x = objs[i][0]
y = objs[i][1]
dx = xper - x
dy = yper - y
dist = math.sqrt(dx*dx+dy*dy)
dx /= dist
dy /= dist
dx *= speed
dy *= speed
objs[i] = (x+dx,y+dy)
return objs
def draw_color_frame(self, frame, target_surface):
target_surface.lock()
address = self._kinect.surface_as_array(target_surface.get_buffer())
ctypes.memmove(address, frame.ctypes.data, frame.size)
del address
target_surface.unlock()
def run(self):
test = 0
objects = []
for i in range(10):
objects.append((random.randint(0,self._frame_surface.get_width()), random.randint(0,self._frame_surface.get_height())))
# -------- Main Program Loop -----------
while not self._done:
# --- Main event loop
for event in pygame.event.get(): # User did something
if event.type == pygame.QUIT: # If user clicked close
self._done = True # Flag that we are done so we exit this loop
elif event.type == pygame.VIDEORESIZE: # window resized
self._screen = pygame.display.set_mode(event.dict['size'],
pygame.HWSURFACE|pygame.DOUBLEBUF|pygame.RESIZABLE, 32)
if self._kinect.has_new_color_frame():
frame = self._kinect.get_last_color_frame()
self.draw_color_frame(frame, self._frame_surface)
frame = None
if self._kinect.has_new_body_frame():
self._bodies = self._kinect.get_last_body_frame()
if self._bodies is not None:
for i in range(0, self._kinect.max_body_count):
body = self._bodies.bodies[i]
if body.is_tracked:
joints = body.joints
# convert joint coordinates to color space
joint_points = self._kinect.body_joints_to_color_space(joints)
try:
leftX=int(joint_points[PyKinectV2.JointType_HandLeft].x)
leftY=int(joint_points[PyKinectV2.JointType_HandLeft].y)
rightX=int(joint_points[PyKinectV2.JointType_HandRight].x)
rightY=int(joint_points[PyKinectV2.JointType_HandRight].y)
xper = int(joint_points[PyKinectV2.JointType_SpineMid].x)
yper = int(joint_points[PyKinectV2.JointType_SpineMid].y)
except:
leftX=0
leftY=0
rightX=0
rightY=0
xper = 0
yper = 0
objects = self.update_objects(objects, xper, yper, 5)
if (body.hand_right_state is not None):
rstate = body.hand_right_state
if (body.hand_left_state is not None):
lstate = body.hand_left_state
if (rstate == 3 and not self.planting
and rightY < 400 and rightY > 0
and rightX > self._frame_surface.get_width() -400):
self.planting = True
if (leftY < 400
and leftX < 400):
self.plants = []
self._frame_surface.blit(self.reset,(0,0))
if self.planting:
self._frame_surface.blit(self.seedImg,(rightX-self.seedImg.get_width()//2,rightY-self.seedImg.get_height()//2))
if rightY > self._frame_surface.get_height() - 150:
self.plants.append((rightX,rightY,self.plantHeads[random.randint(0,len(self.plantHeads)-1)],[]))
self.planting = False
else:
xper = 0
yper = 0
self._frame_surface.blit(self.reset,(0,0))
self._frame_surface.blit(self.sun,(xper-100,yper-100))
self._frame_surface.blit(self.basket,(self._frame_surface.get_width()-300,0))
self._frame_surface.blit(pygame.transform.scale(self.ground,(self._frame_surface.get_width(),150)),(0,self._frame_surface.get_height()-150))
self.count += 1
for i in range(len(self.plants)):
x1 = self.plants[i][0]
y1 = self.plants[i][1]
p = self.plants[i][2]
past = self.plants[i][3]
if self.count == 30:
xdiff = x1 - xper
ydiff = y1 - yper
x1 -= xdiff / 150
y1 -= ydiff / 90
past.append((x1,y1))
for j in range(len(past)-2):
past1 = past[j]
self._frame_surface.blit(self.stem, past1)
if len(past) < 30:
self._frame_surface.blit(self.bud, (x1-30,y1-30))
else:
self._frame_surface.blit(p, (x1-30,y1-30))
self.plants[i] = (x1,y1,p,past)
if self.count == 30:
self.count = 0
# --- copy back buffer surface pixels to the screen, resize it if needed and keep aspect ratio
# --- (screen size may be different from Kinect's color frame size)
h_to_w = float(self._frame_surface.get_height()) / self._frame_surface.get_width()
target_height = int(h_to_w * self._screen.get_width())
surface_to_draw = pygame.transform.scale(self._frame_surface, (self._screen.get_width(), target_height));
self._screen.blit(surface_to_draw, (0,0))
surface_to_draw = None
pygame.display.update()
pygame.display.flip()
self._clock.tick(60)
self._kinect.close()
pygame.quit()
__main__ = "Kinect v2 Body Game"
game = BodyGameRuntime();
game.run();
Our project was an attempt at creating an intelligent environment that emulated the act of caring for another form of life.