Bus Buddy
Made by Lillie Widmayer, Jonathan Fortis and Maya Pandurangan · UNLISTED (SHOWN IN POOLS)
Made by Lillie Widmayer, Jonathan Fortis and Maya Pandurangan · UNLISTED (SHOWN IN POOLS)
Created: September 27th, 2019
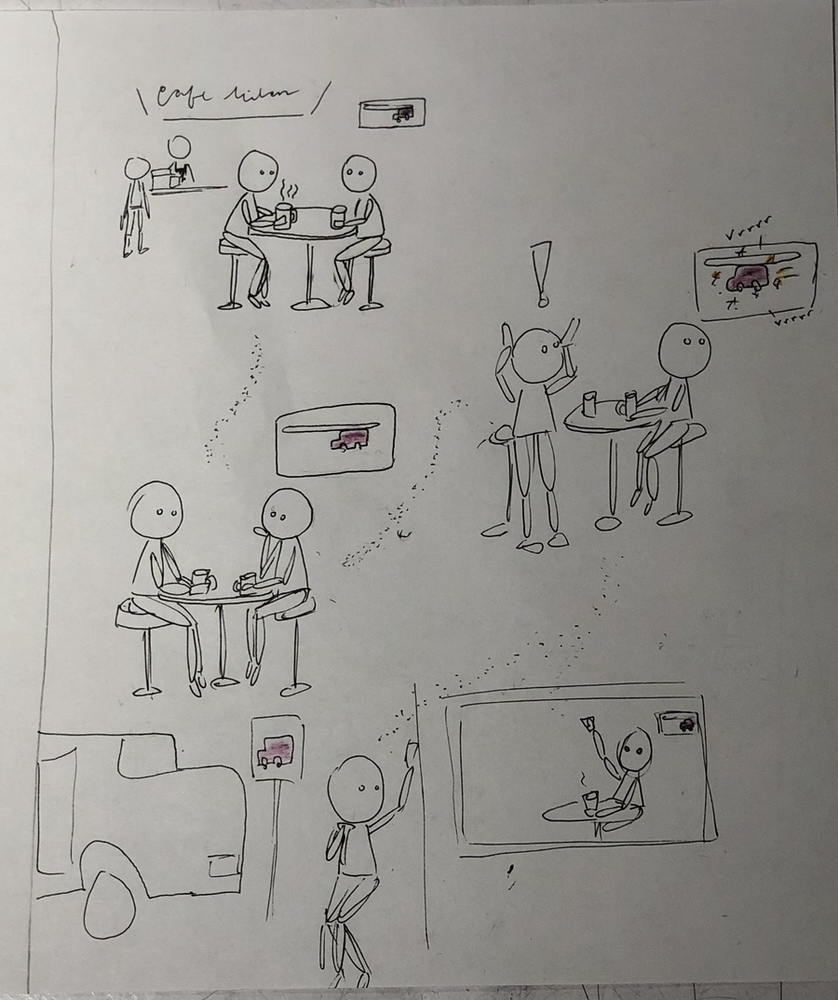
Conceptual Design:
Context it operates in:
It is a casual display meant to be housed in public spaces like coffee shops, libraries, restaurants, etc
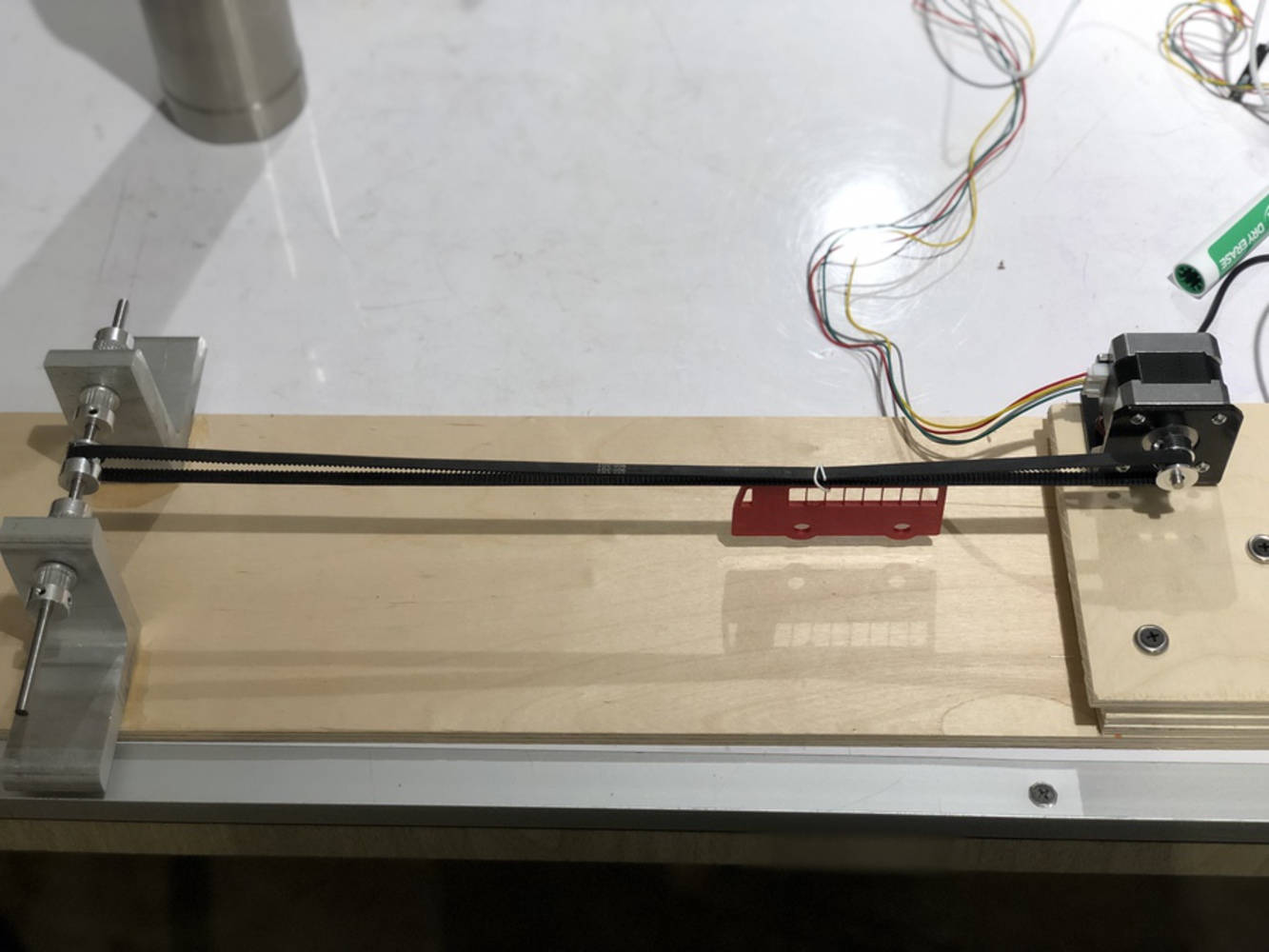
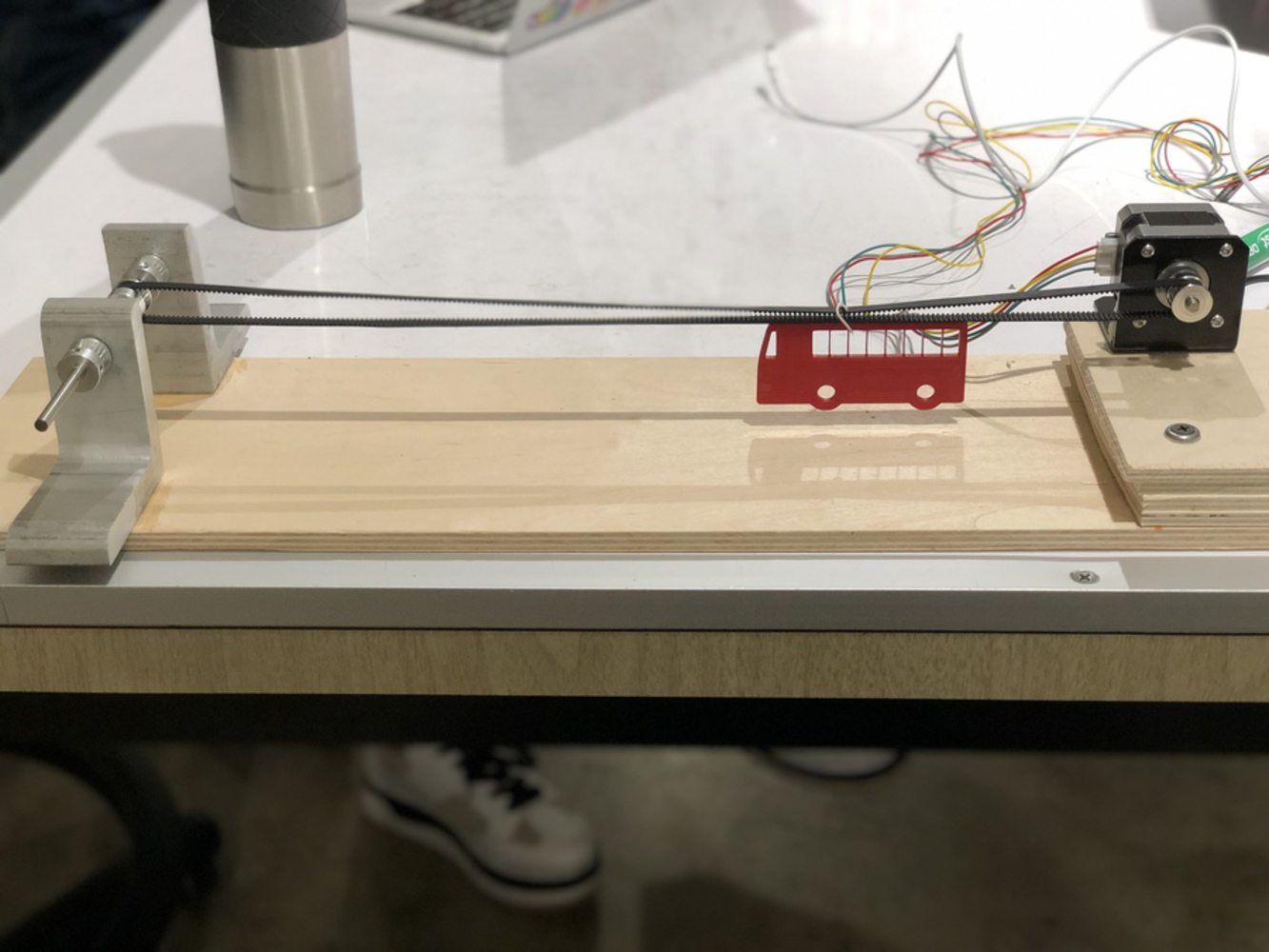
What it does:
A miniature bus “drives” to represent a real bus approaching a nearby stop
How/Why someone interacts with it:
People can casually glance up at the display whenever they want to. These interactions should be completely unobtrusive to their experience at a coffee shop or public space - it simply provides people with relevant and easily digestible information
Brainstorming ideas for project
This project is only listed in this pool. Be considerate and think twice before sharing.
Thermostats, locks, power sockets, and lights are all being imbued with smarts making them increasingly aware and responsive to their environment and users. This course will chart the emergence of ...more
~
