Drone Photogrammetry
Made by ialvarad ·
Made by ialvarad ·
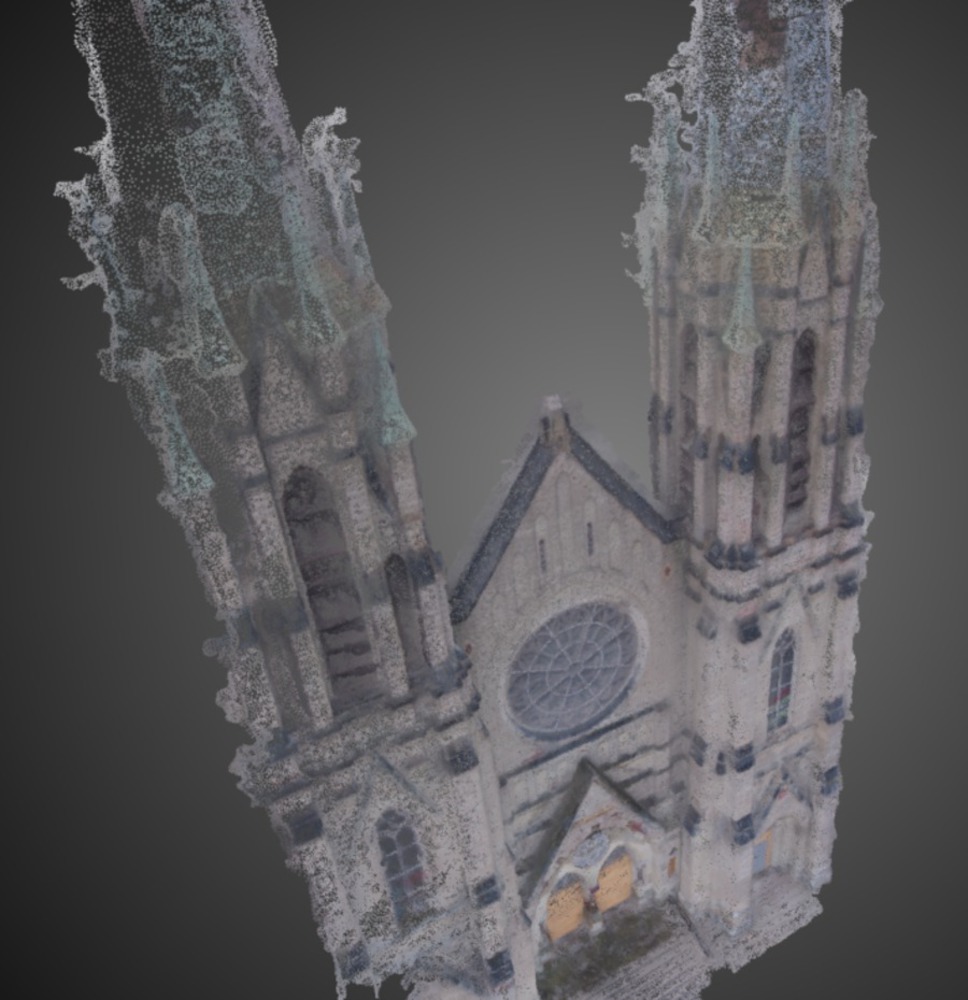
For this project I captured the main façade of St. Peter and Paul's Church in East Liberty using drone pictures and photogrammetry. The goal: To capture a 3D model of an artifact that satisfies two requirements: 1.some of its qualities are hidden from daily commuters or anyone who mainly moves at the ground level 2.because of its scale, the artifact is tedious or impossible to capture with some sort of handheld camera (aerial photography is widely used, but who has access to a plane?!)
Created: December 17th, 2015
This project is only accessible by signed in users. Be considerate and think twice before sharing.
For this project I captured the main façade of St. Peter and Paul's Church in East Liberty using drone pictures and photogrammetry.
The goal: To capture a 3D model of an artifact that satisfies two requirements:
1.some of its qualities are hidden from daily commuters or anyone who mainly moves at the ground level
2.because of its scale, the artifact is tedious or impossible to capture with some sort of handheld camera (aerial photography is widely used, but who has access to a plane?!)