Process: Issues
We ran into some issues while putting together our final creation.
(1) The acetate we ordered did not work on the art department plotter we planned on using. Instead, we had to settle for acetate from the art department which had a slight blue tint and was not as translucent as we had hoped.
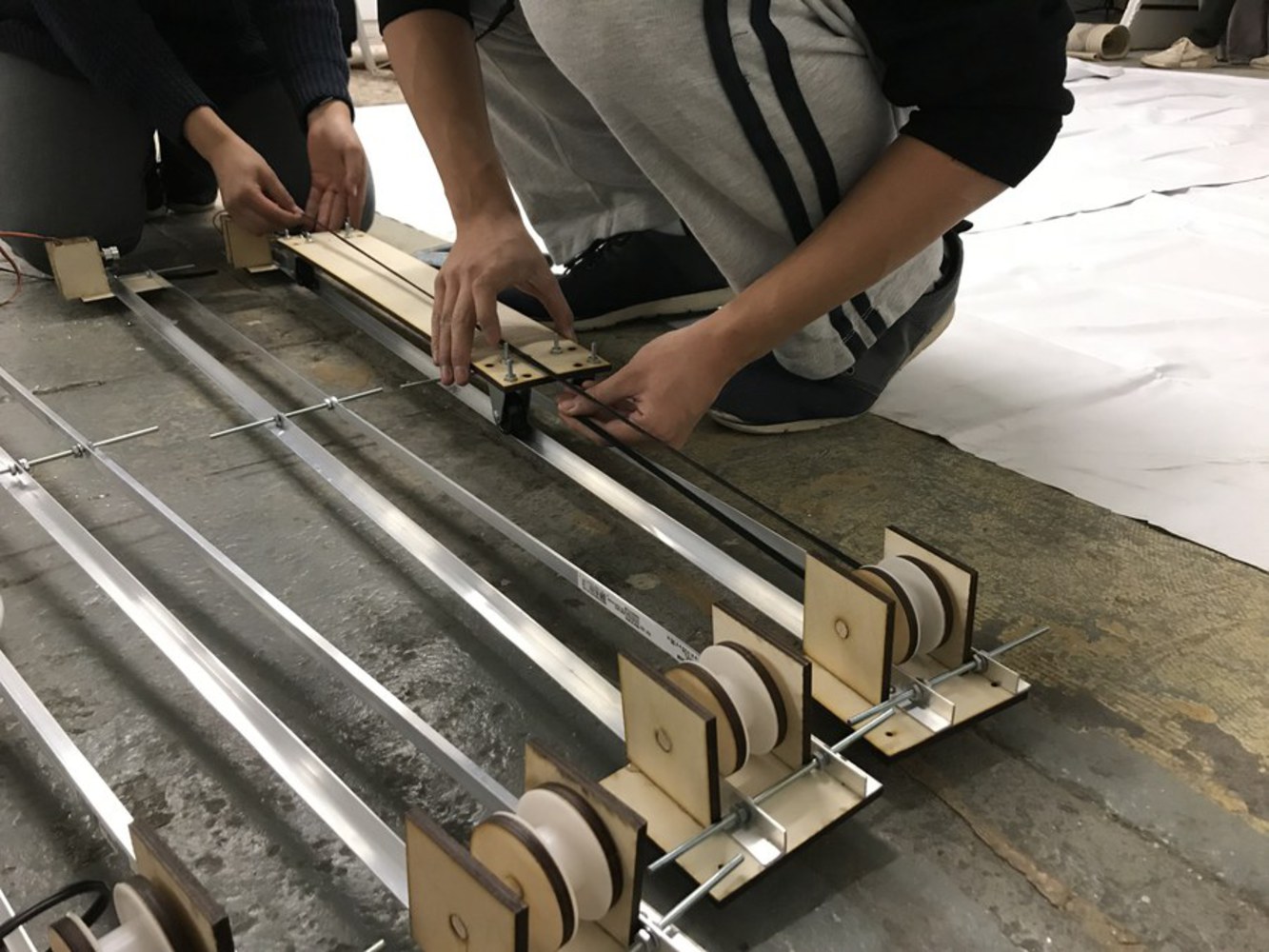
(2) The acetate at the art department plotter was not nearly as long as we had hoped for. instead, we had to make do by splitting our original prints into two sheets. We later had to glue these sheets to acrylic top and bottom frames (to add weight) which also proved to be tedious.
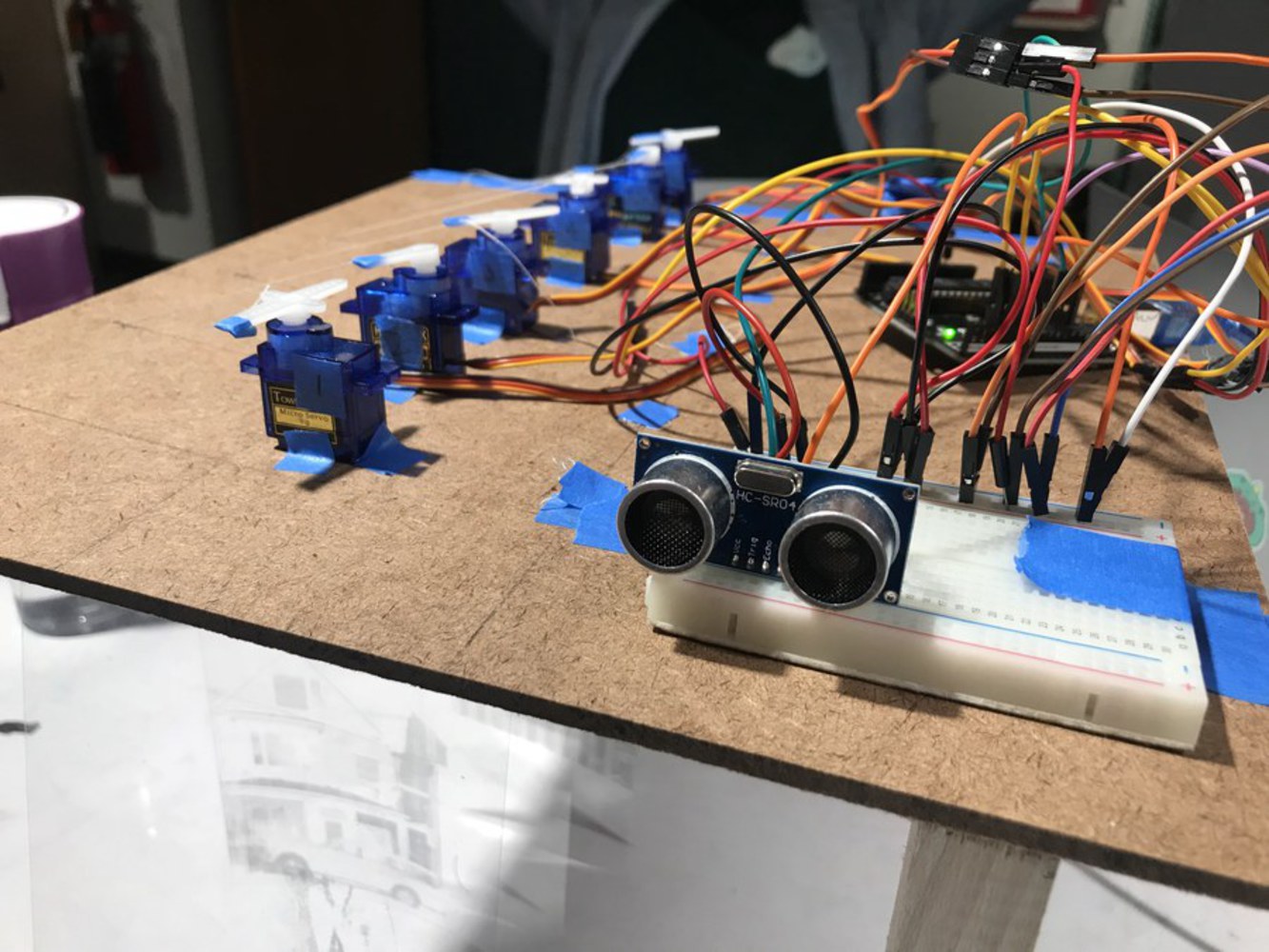
(3) We had some issues with wiring and were unable to resolve it for our final show.
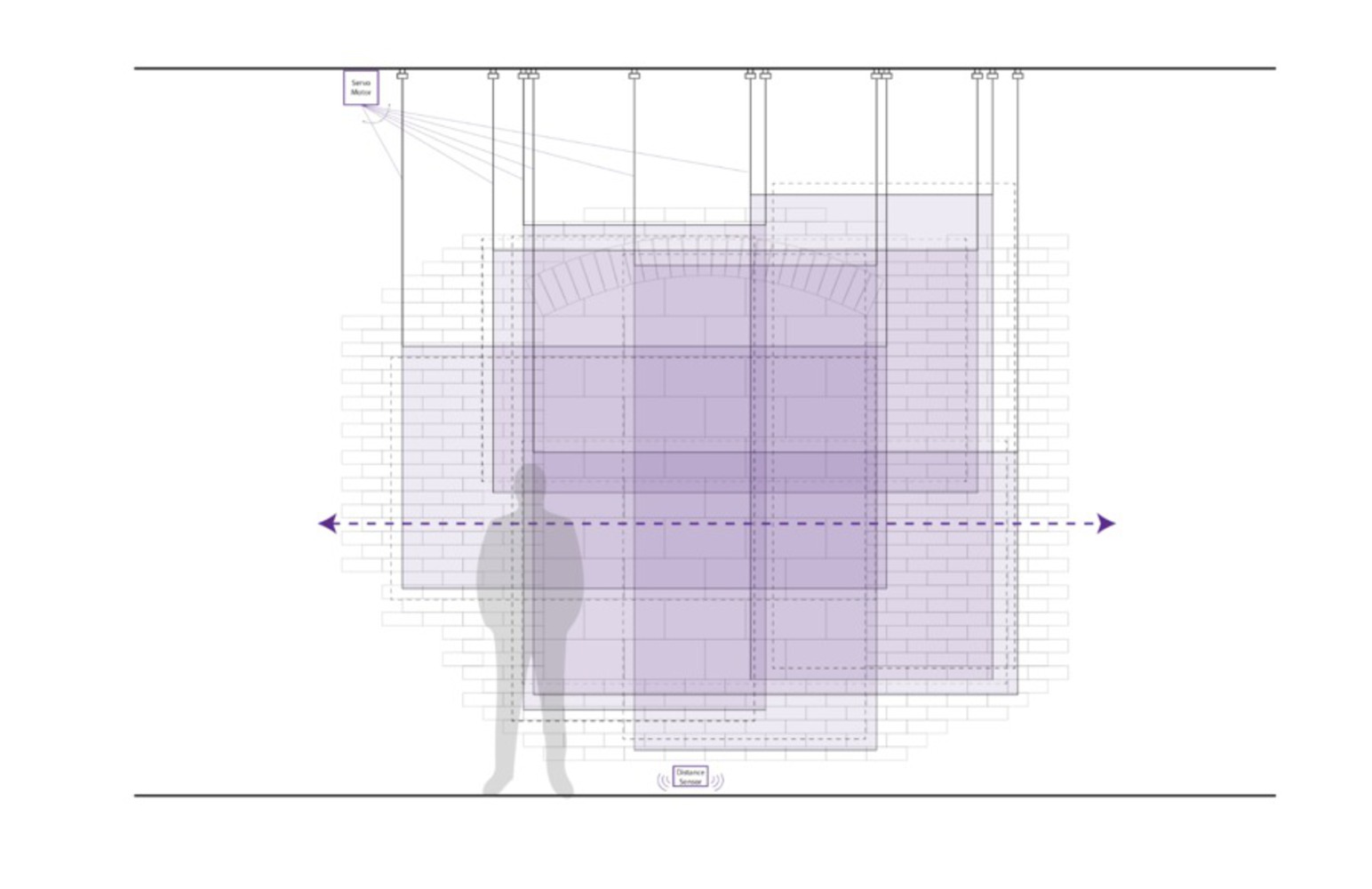
(4) We underestimated how far to move the acetate in our original planning and thus when the acetate panels did move it was minimal and far less than what we had hoped for.
(5) The amount of power we needed to supply for all of the servo motors to be able to move all of the acetate sheets was much greater than what we were able to provide, causing discrepancies in the functionality of the motors.