SkillDev5-Chengzhi Zhang & Kenny Harsono
Made by Chengzhi Zhang and kharsono
Made by Chengzhi Zhang and kharsono
Created: December 6th, 2021
// This value will store the last time we published an event
long lastPublishedAt = -1;
// this is the time delay before we should publish a new event
// from this device
int publishAfter = 1000;
// Setup inputs and outputs
int ledPin = D3;
int buttonPin = D2;
int buttonState = -1;
int remotePosition = -1;
int convertedToPosition = -1;
int servoPin = A4;
Servo servo;
bool updateServo = true;
void setup()
{
Serial.begin( 9600 );
pinMode(ledPin, OUTPUT );
pinMode(buttonPin, INPUT_PULLUP);
blinkLED( 10 );
servo.attach( servoPin );
//testServo();
Particle.variable( "remPosition", remotePosition );
Particle.variable( "cPos", convertedToPosition );
Particle.subscribe( "naturallic/paired/", handleServoToggleMessage );
}
void testServo(){
// Test the servo is working and connected
servo.write( 90 );
delay(1000);
servo.write( 5 );
delay(1000);
servo.write( 170 );
delay(1000);
}
void loop()
{
int value = digitalRead( buttonPin );
if( value == LOW && buttonState != value ){
// there's been a change.
remotePosition = -remotePosition;
updateServo = true;
blinkLED( 3 );
// publish my event
// you'll want some more complex stuff here
publishMyEvent( );
}
// store the value for the next press.
buttonState = value;
if( updateServo ){
if( remotePosition == -1 ){
Serial.println( "setting zero to -1 ");
servo.write( 5 );
}else{
Serial.println( "setting zero to +1 ");
servo.write( 175 );
}
updateServo = false;
}
// delay for a bit
delay(100);
}
void blinkLED( int times ){
for( int i = 0; i< times; i++){
digitalWrite( ledPin, HIGH );
delay(100);
digitalWrite( ledPin, LOW );
delay(100);
}
}
void publishMyEvent()
{
// Remember that a device can publish at rate of about 1 event/sec,
// with bursts of up to 4 allowed in 1 second.
// Back to back burst of 4 messages will take 4 seconds to recover.
// So we want to limit the amount of publish events that happen.
// check that it's been 10 secondds since our last publish
//Particle.publish( "test" , String( remotePosition ) );
if( lastPublishedAt + publishAfter < millis() )
{
String eventName = "naturallic/paired/" + System.deviceID();
Particle.publish( eventName, String( remotePosition ) );
// we just pubished so capture this.
lastPublishedAt = millis();
}
}
void handleServoToggleMessage( const char * event, const char *data )
{
String eventStr = String( event );
String dataStr = String( data );
String deviceID = System.deviceID();
int position = dataStr.toInt();
// if (eventStr.indexOf( deviceID ) != -1) {
// return;
// }
// else {
if( position == -1 or position == 1){
remotePosition = position;
updateServo = true;
}
Serial.print( "handleServoToggleMessage " );
Serial.print( data );
Serial.print( "from Device: " );
Serial.println( eventStr );
// }
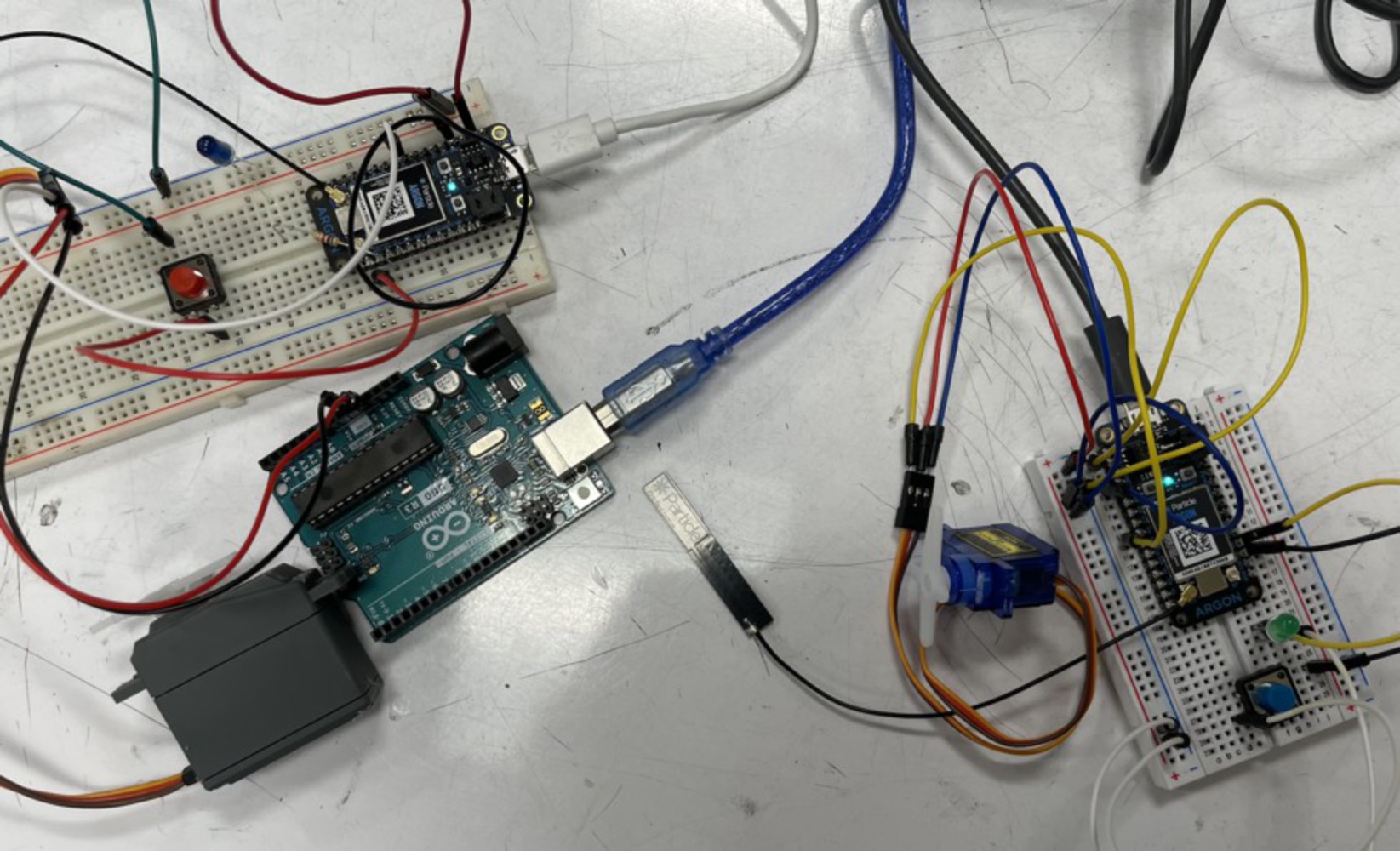
}Firstly we used the code and the script Professor provided in class. The two device worked well separately. We tried different servo because only a few in physical computing lab works. Besides, as one servo requires 5V power source, we adopted another arduino board for power source. After that, We modified the event name to a distinguishable one. However, as the two particles are under two accounts, we did not succeed. We claimed the two particles under one account and used the same code, it worked well. We also found that