Product
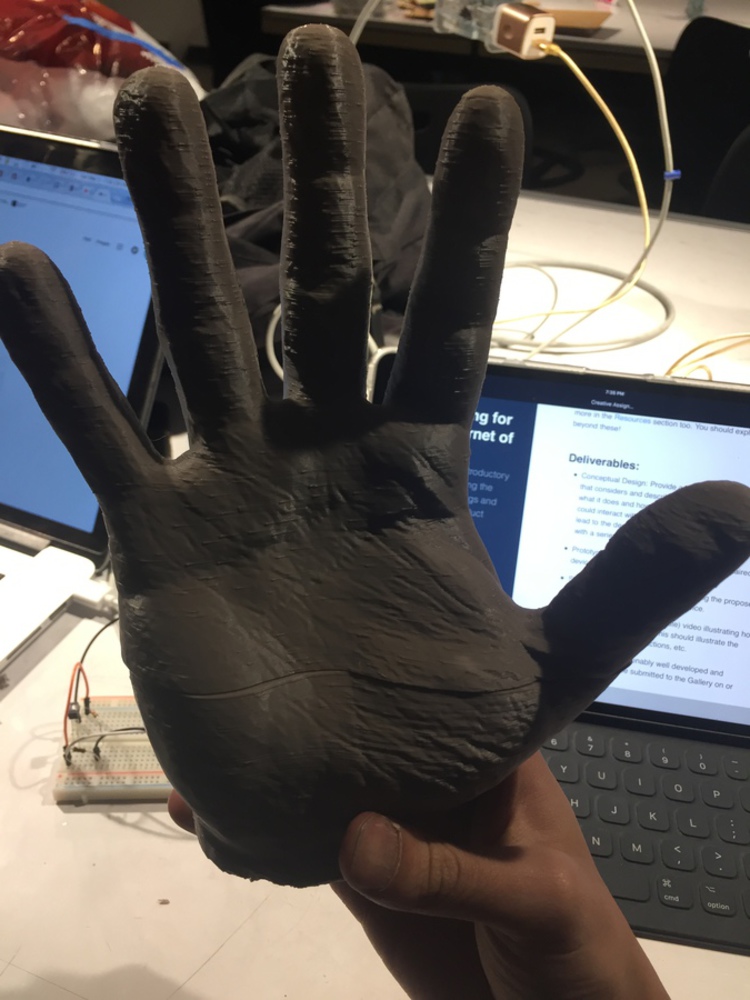
For this project, we decided to have the 3D-Printed Hands attach directly to the left hand of each user. This method allows for easy access and the possibility for the secondary (activated) hand to always make contact with the user's hand.
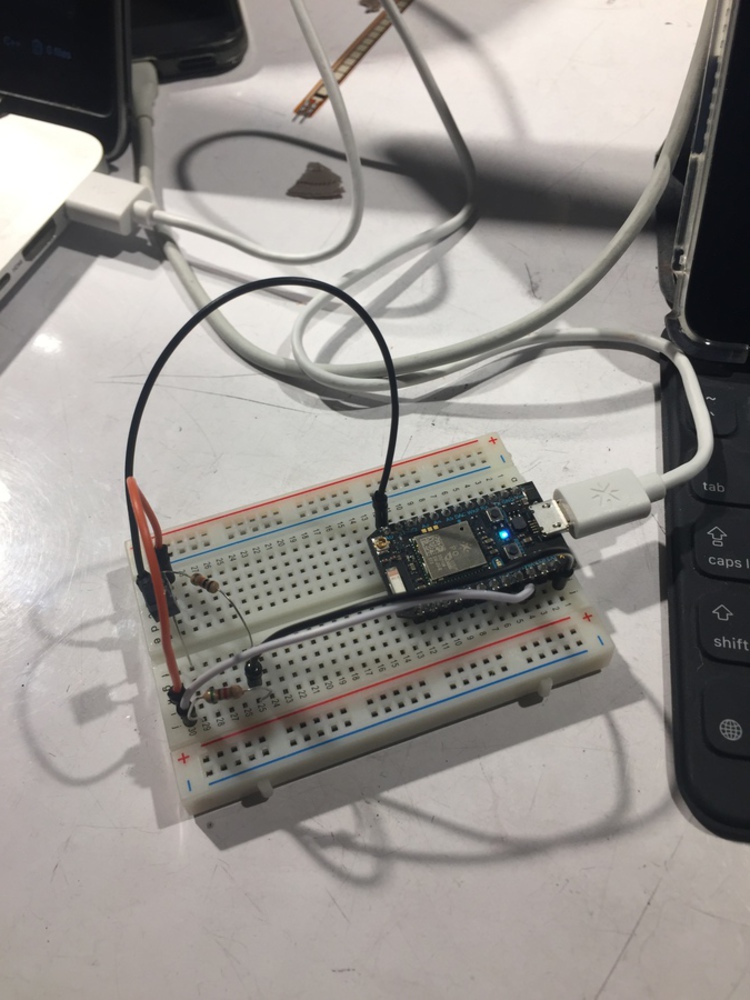
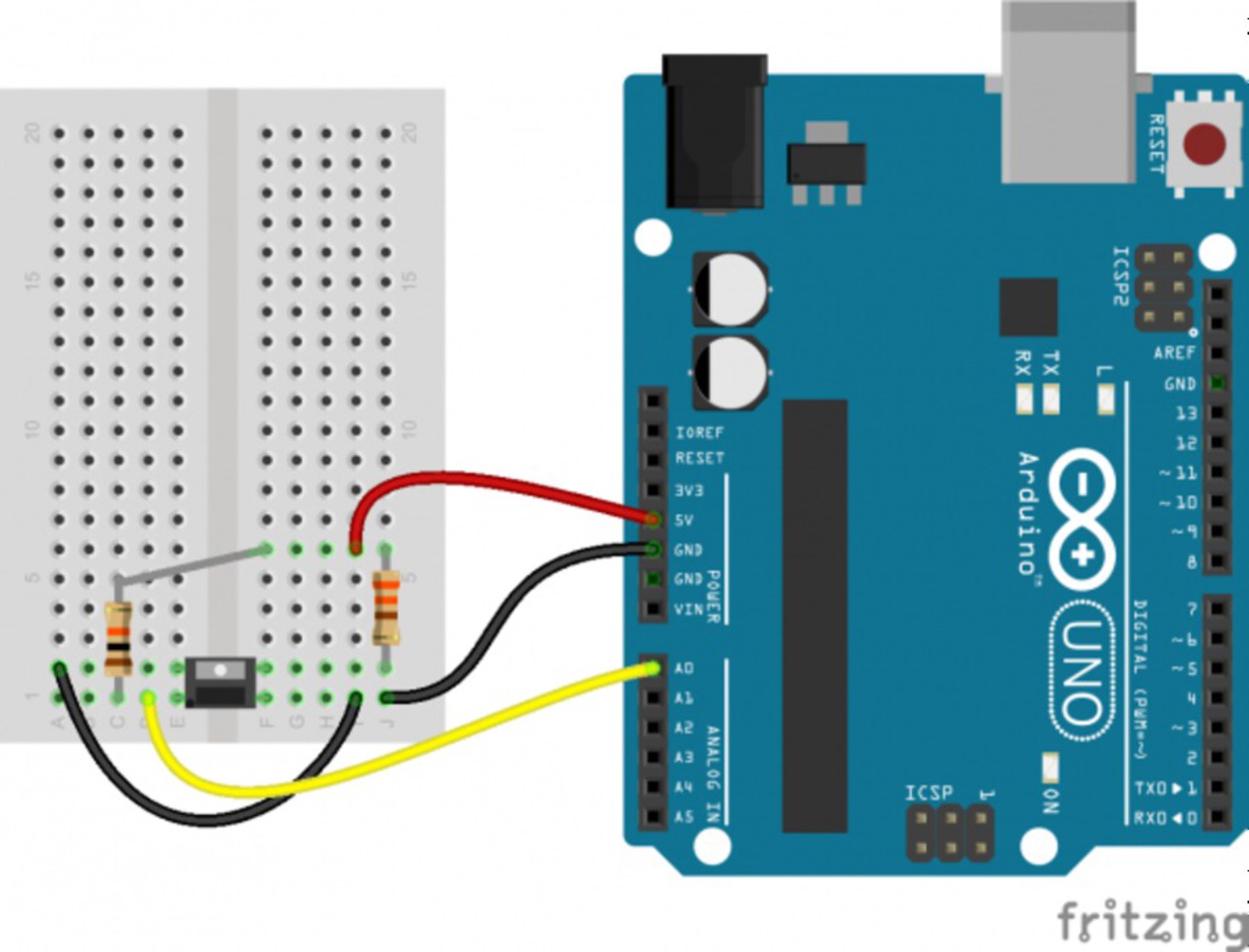
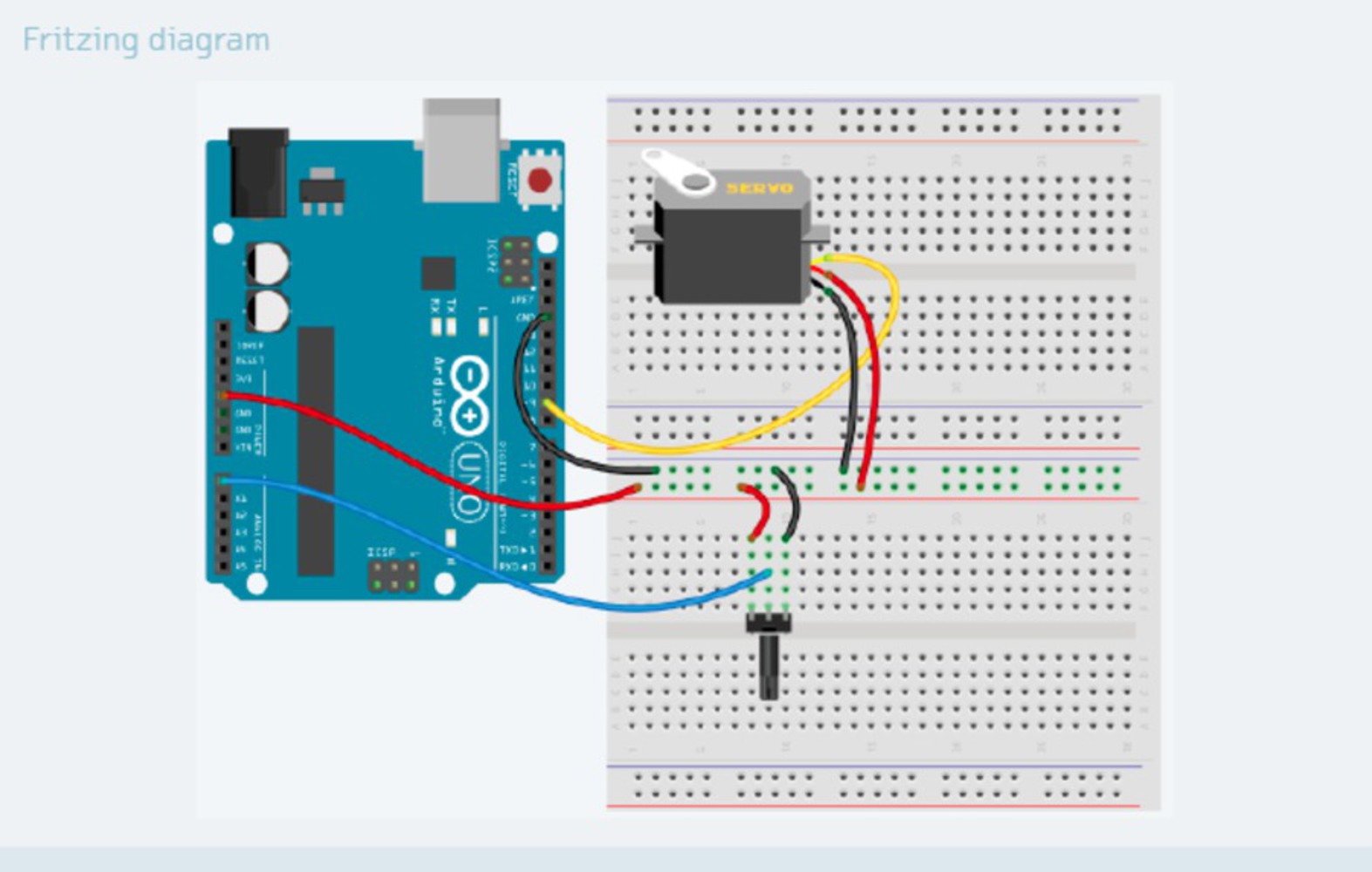
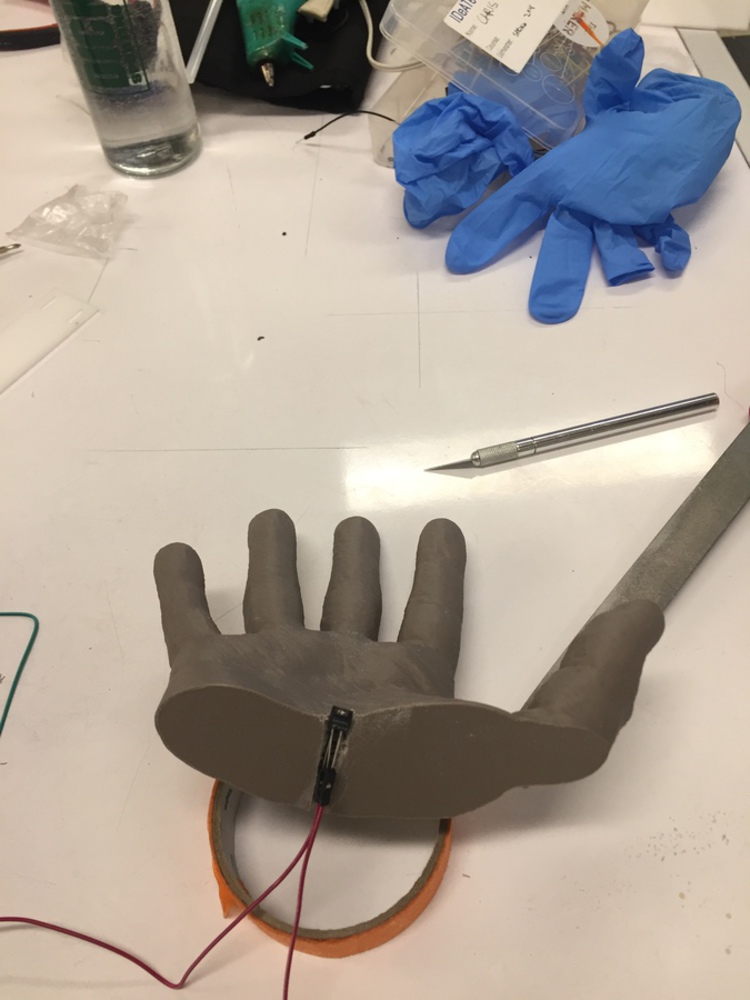
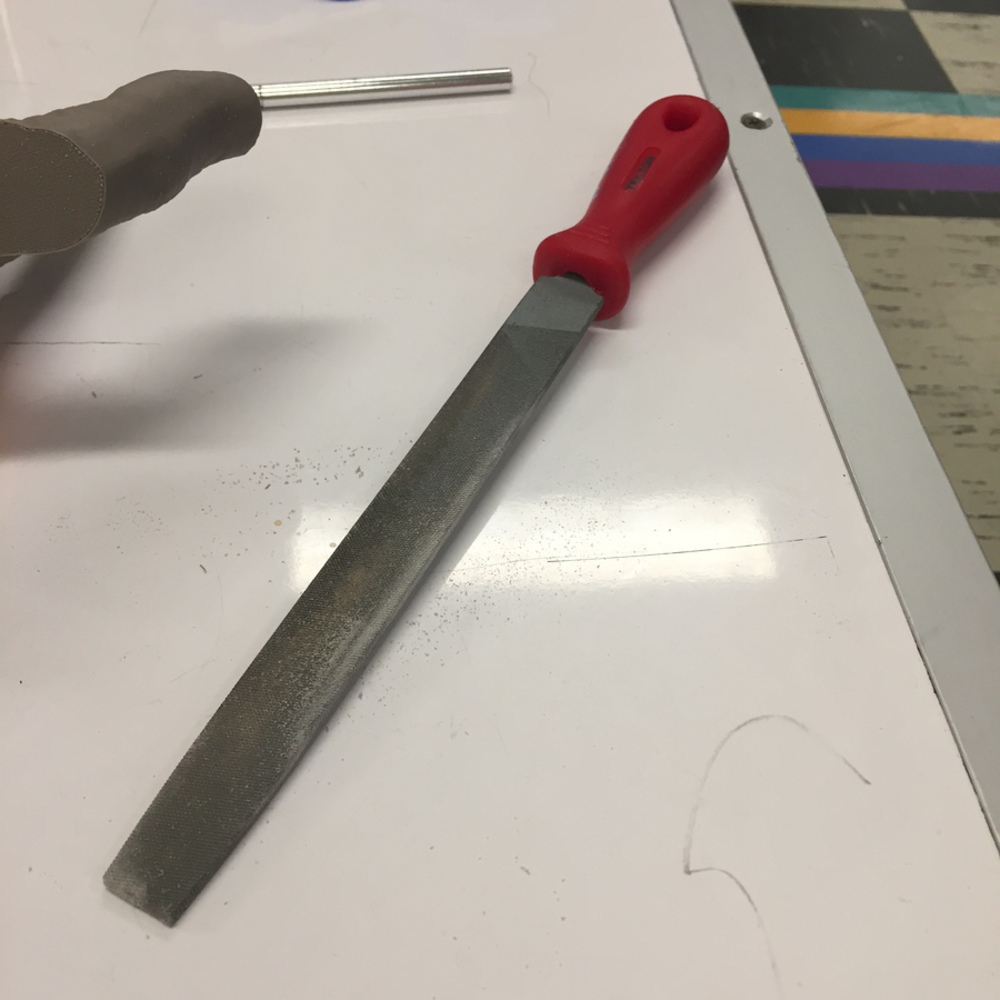
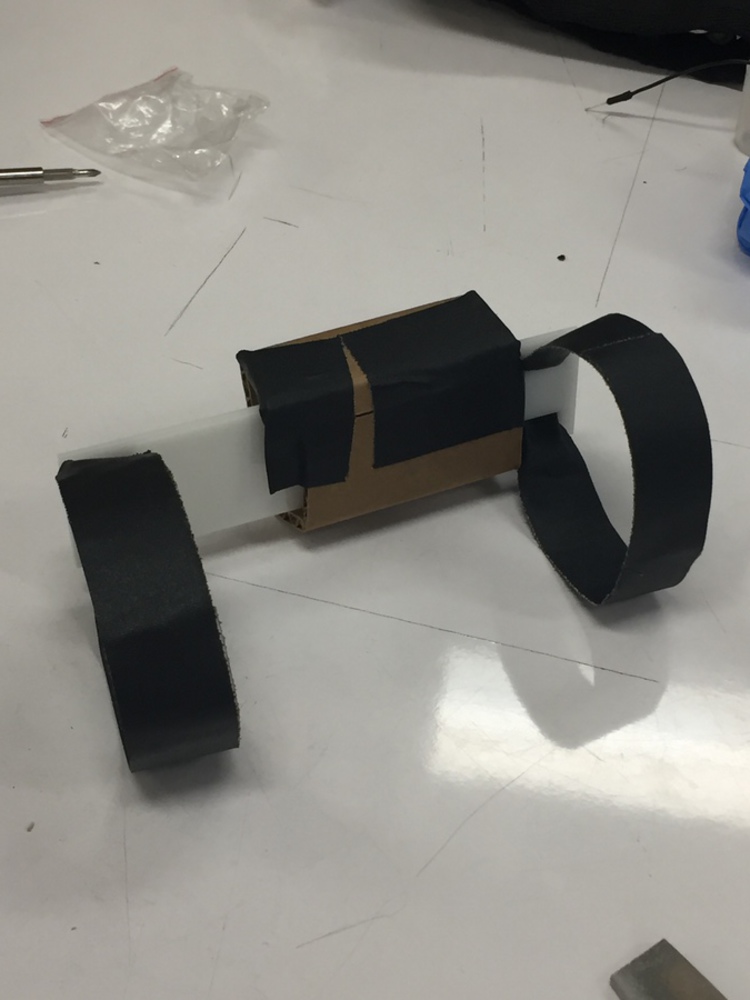
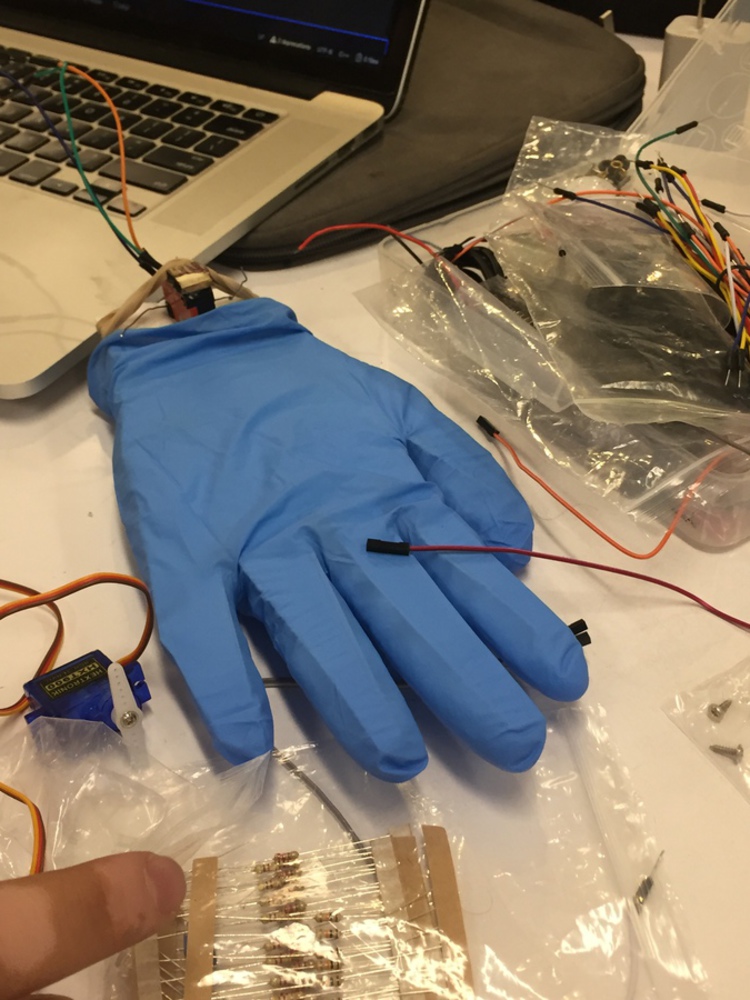
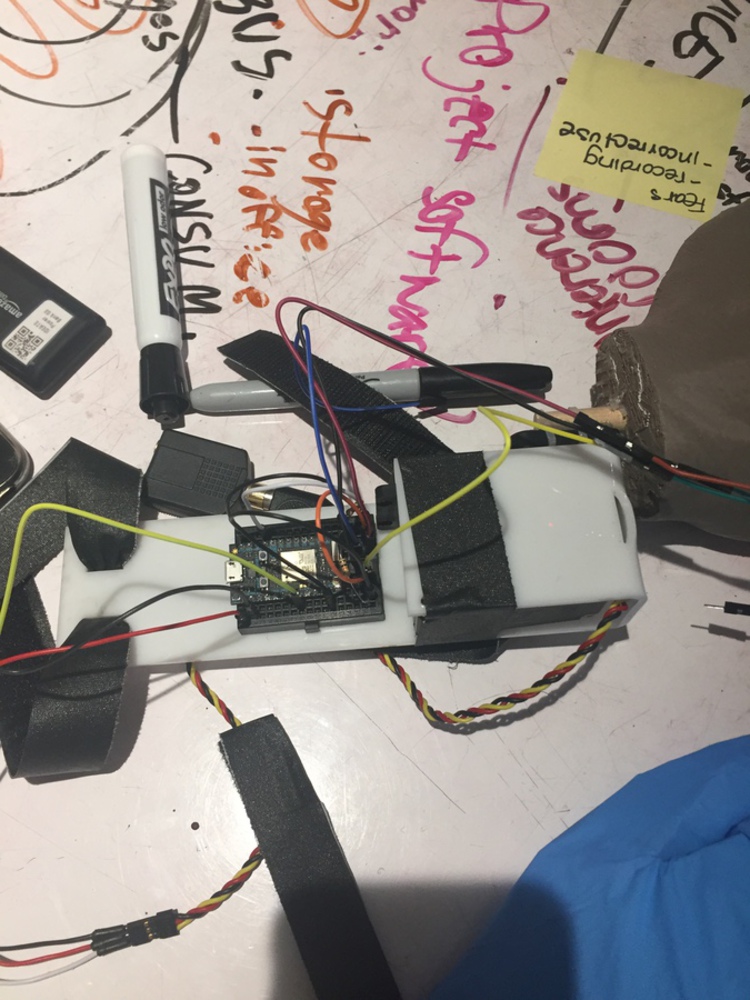
Only one hand could be 3D-printed (B) due to printing constraints, so we used a glove filled with cotton and plywood to construct the other. However, both 3D printed hands can be easily made using an STL file found online (see Works Cited). Both of these were connected to an IR proximity sensor (C) mounted in the middle of the hand after a ~0.5 inch indent (D) was made with a diamond file (E). The Arduino setup for the IR sensor and an idea of the jumper connection length needed is shown in pictures below. Afterwards, a mount of the acrylic with the velcro were made and attached to the user's left arm (F). Meanwhile, the hand was attached to the pivot arm of the servo (A) by drilling a wooden peg in and tying aluminum wire around it (G). This step makes it possible for the hand to turn (from 30 to 65 degrees) when prompted. Additionally, a smaller breadboard was connected to the components to allow for storage.(H) These two components now fit quite easily into each other, as seen in the video.
The code contains functions "sendSlap" and "receiveSlap" to communicate and subscribe to an event, and is included below. Additionally, sufficient delay in data input was used to ensure that the IR sensor would not activate when approaching the hand, effectively preventing a high-five loop. In the video, you can see that there is a slightly annoying delay between input and output due to this countermeasure.