Park Information Tracker
Made by lortega, Lillie Widmayer and Maya Pandurangan
Made by lortega, Lillie Widmayer and Maya Pandurangan
Created: December 13th, 2019
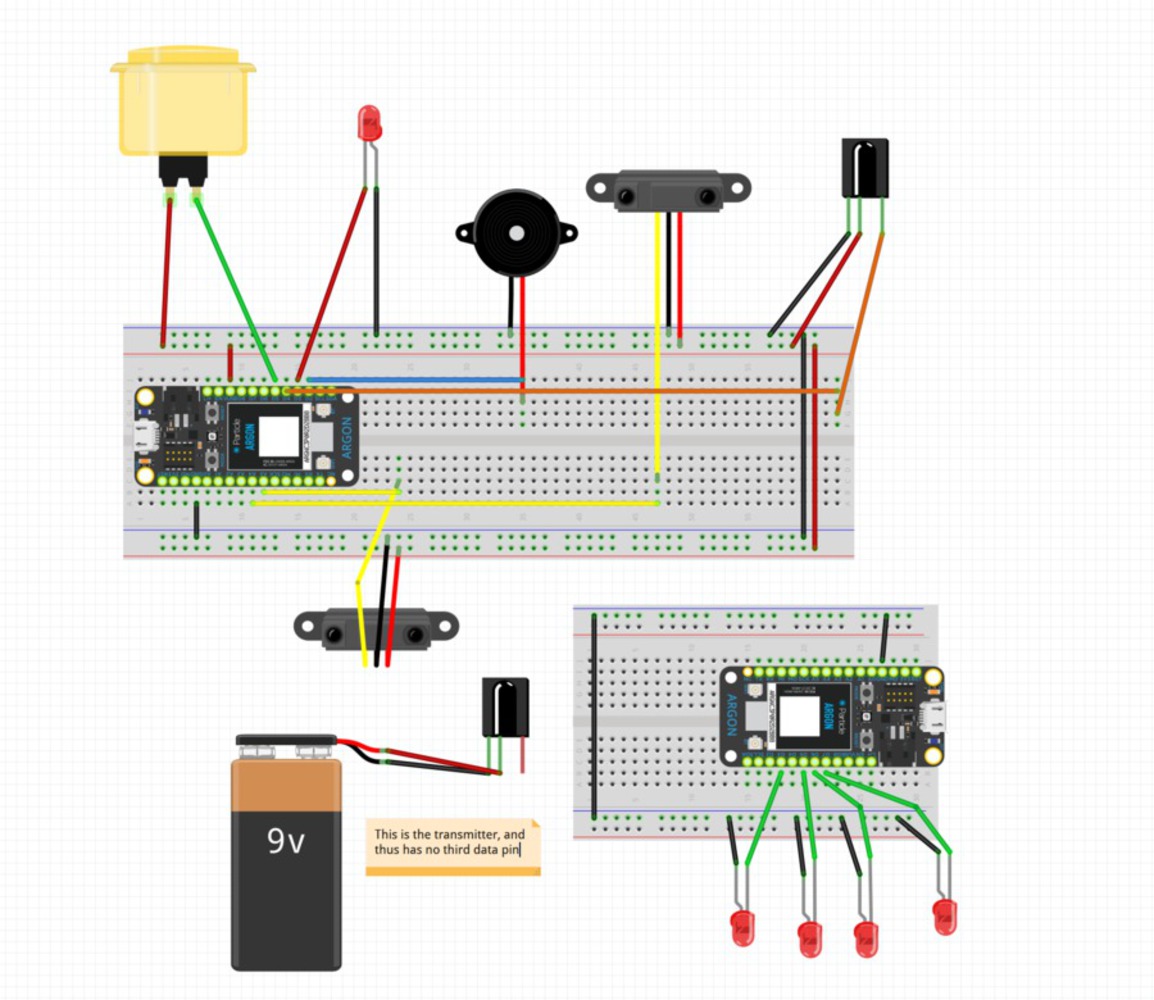
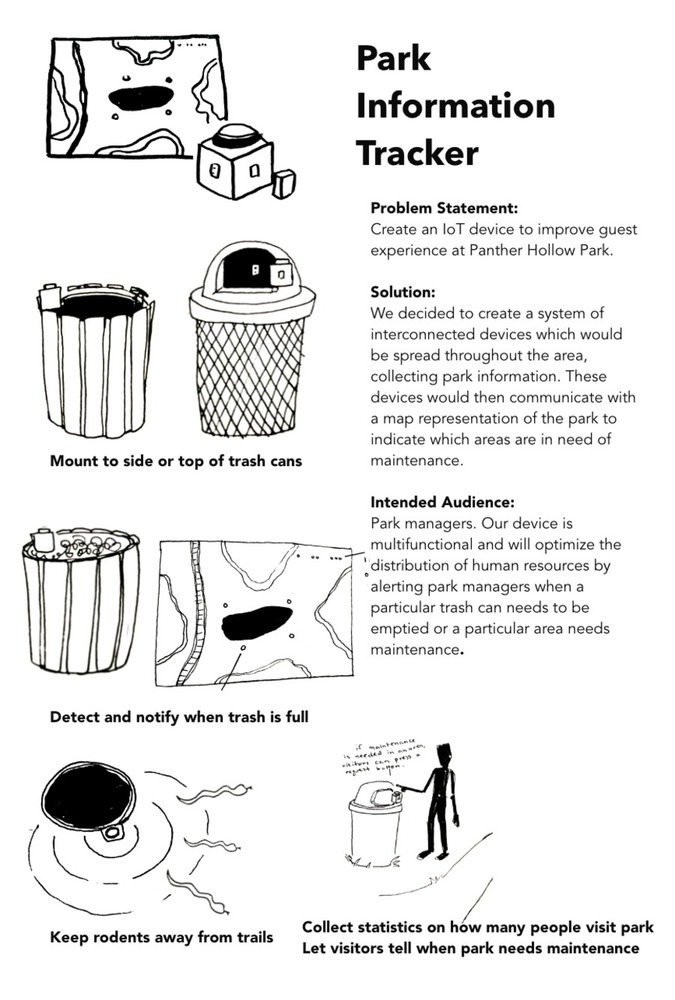
Process: The main goals for this project were to (1) detect if a trash can is full and update the map/email the park managers if it is, (2) allow park goers to give input about the current state of the park through a button press, (3) count the number of people currently visiting the park (4) keep animals away with sound. Our first iteration was less design focused and more functionality driven.
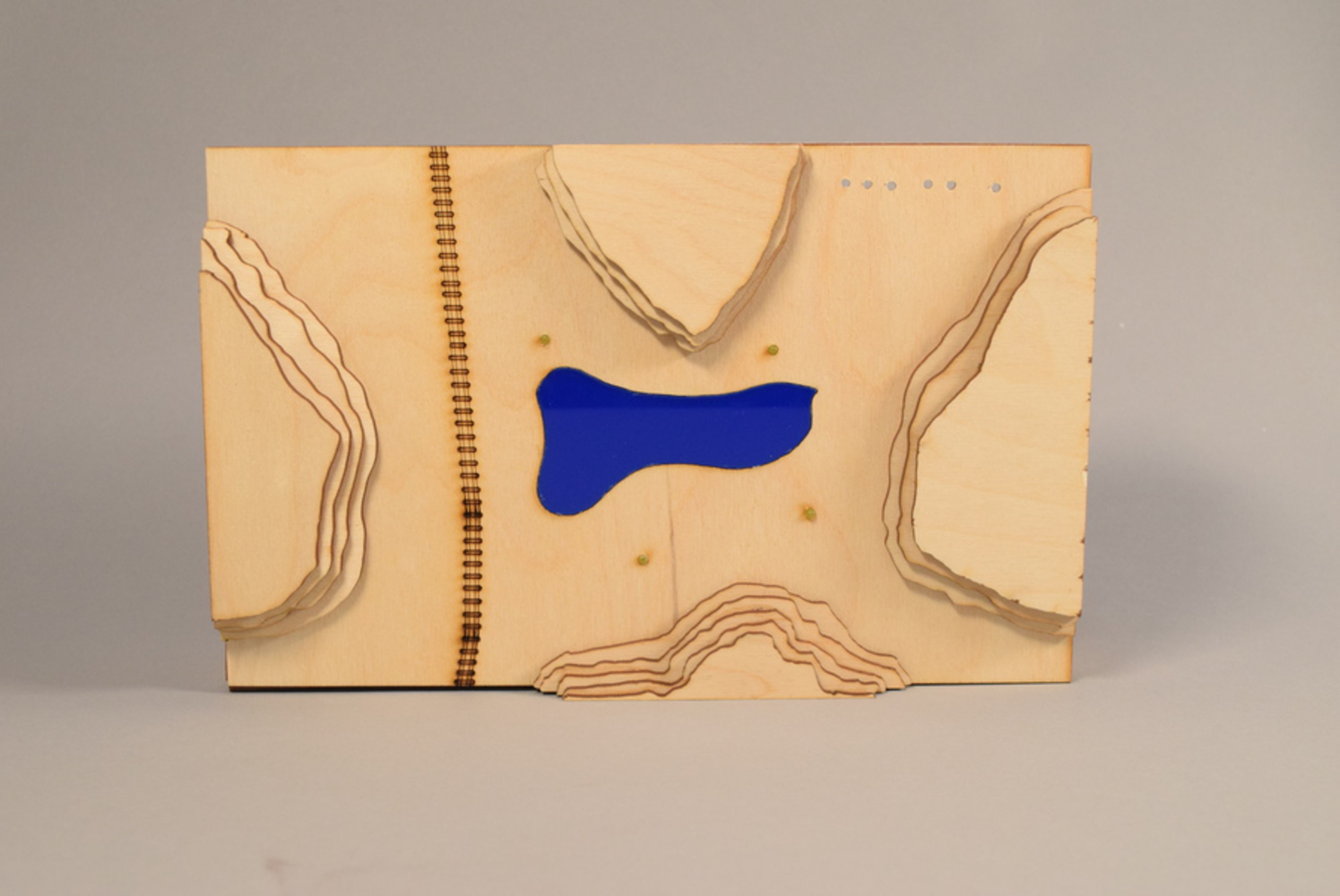
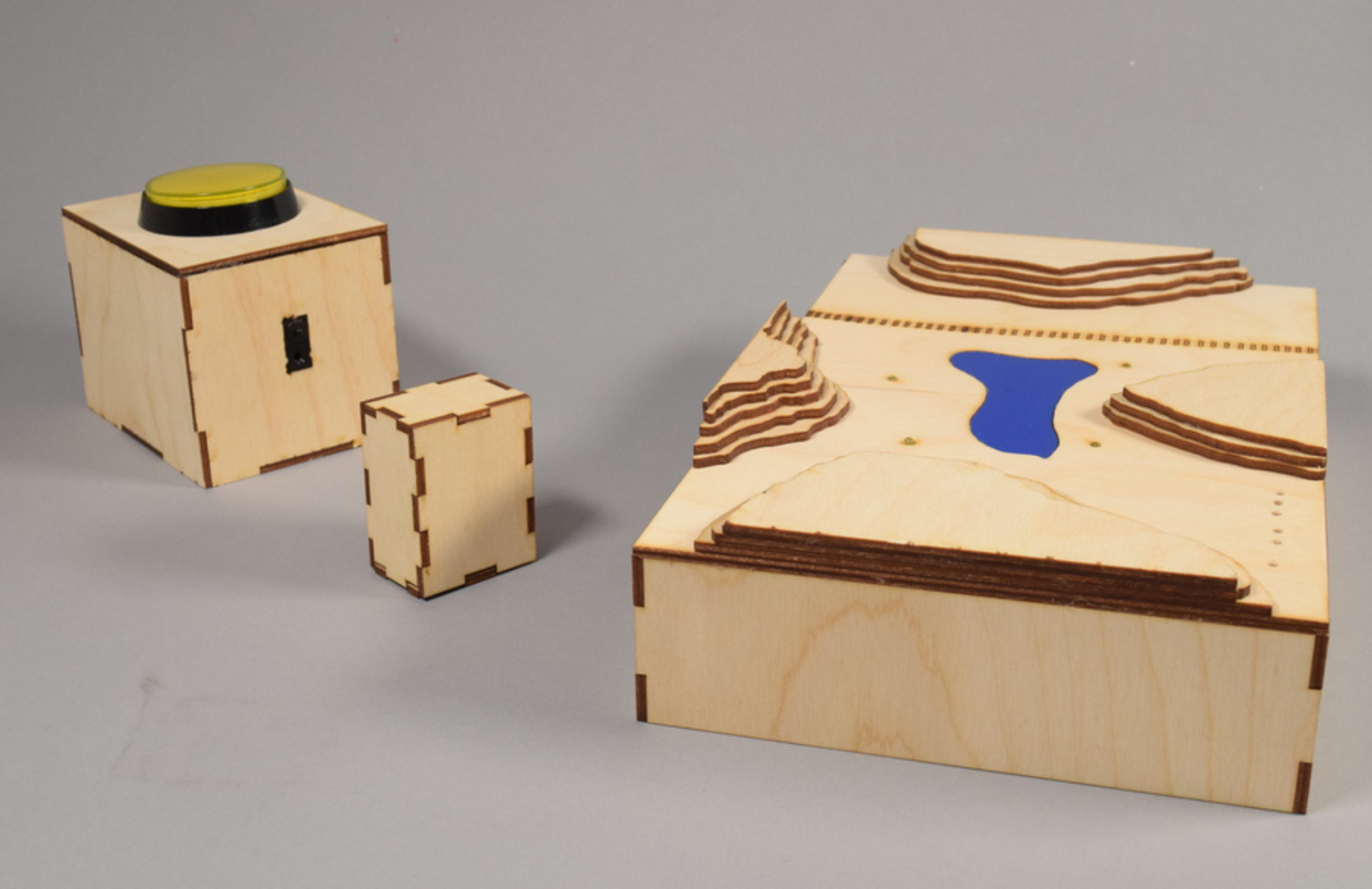
For the final iteration of the project we decided to create a more artistic map representation of the park. We created a topographical map and incorporated a blue acrylic piece for the lake. We cleaned up the devices that would be mounted on the trash cans to perfectly fit the sensors. We implemented an IFTTT to send emails to park managers, and implemented publishing/subscribing between particles so that the map could receive information from the devices mounted on trash cans.
Thermostats, locks, power sockets, and lights are all being imbued with smarts making them increasingly aware and responsive to their environment and users. This course will chart the emergence of ...more
~
