AR Translations
Made by mtegene
Made by mtegene
I want to create an application that aids in language learning. Building your vocabulary is an important aspect of learning a new language, and I believe it would be helpful if common objects were annotated (using AR) in the language you are trying to learn. That is what my projects attempts to do.
Created: May 10th, 2017
DISCLAIMER: All the technology I need for my project to work as envisioned does not exist or is not readily available right now (technology like object recognition) so my project in a sense is "hard-coded" to only work in one specific place (one room) currently. The hope is, as technology advances and becomes more readily available, I can pop that into the project and make it work as envisioned.
GENERAL PROJECT PROCESS DESCRIPTION:
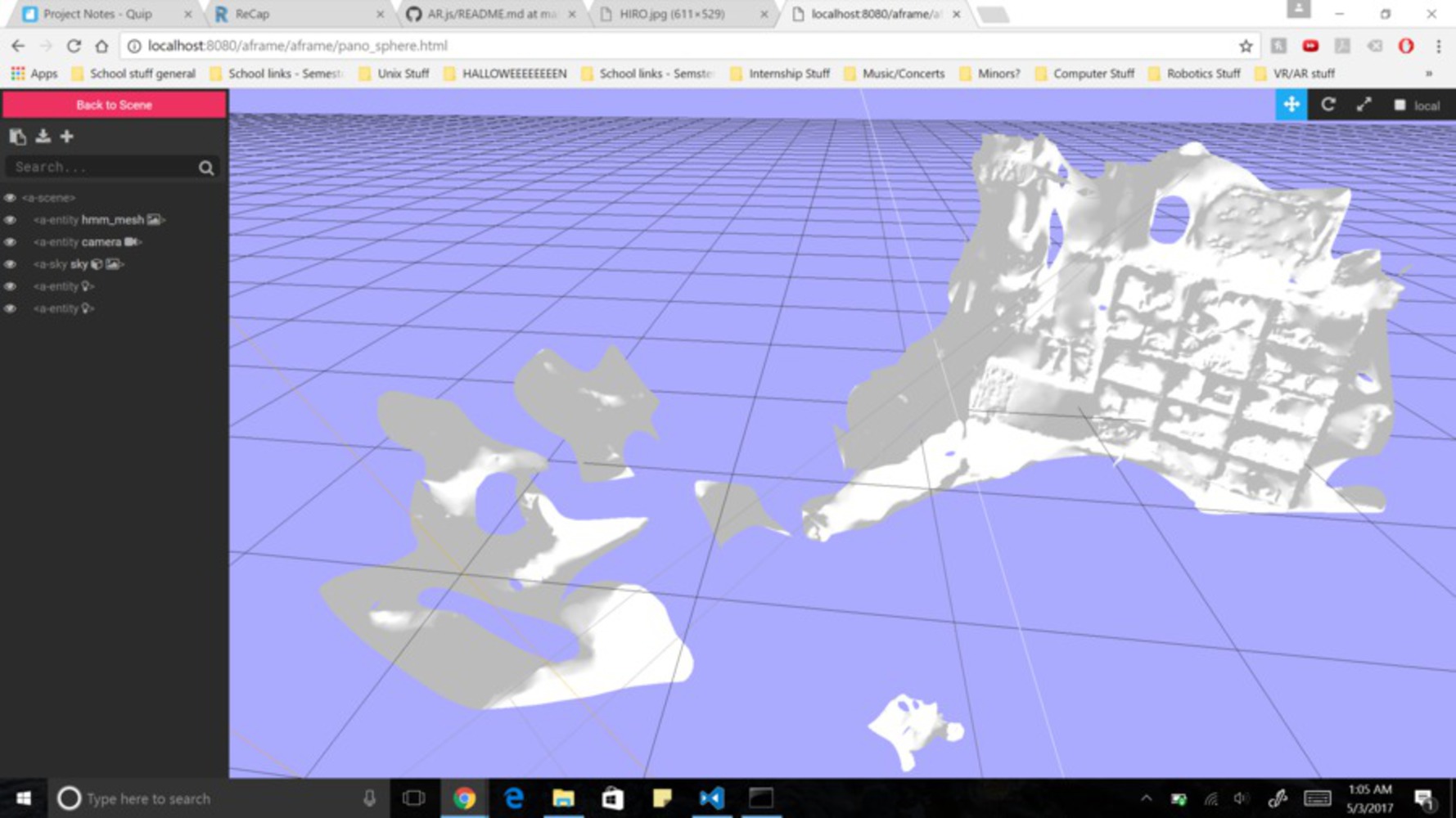
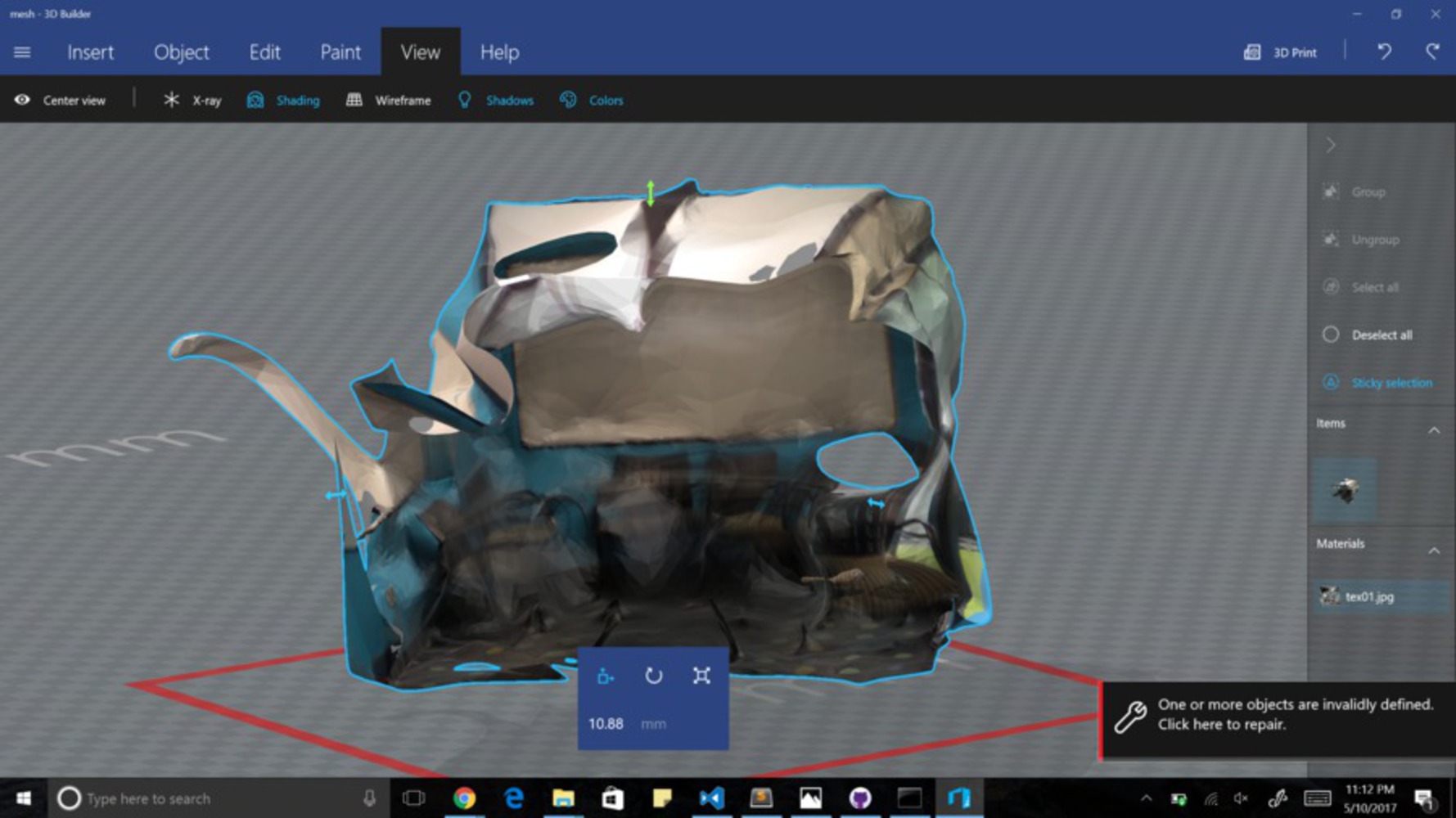
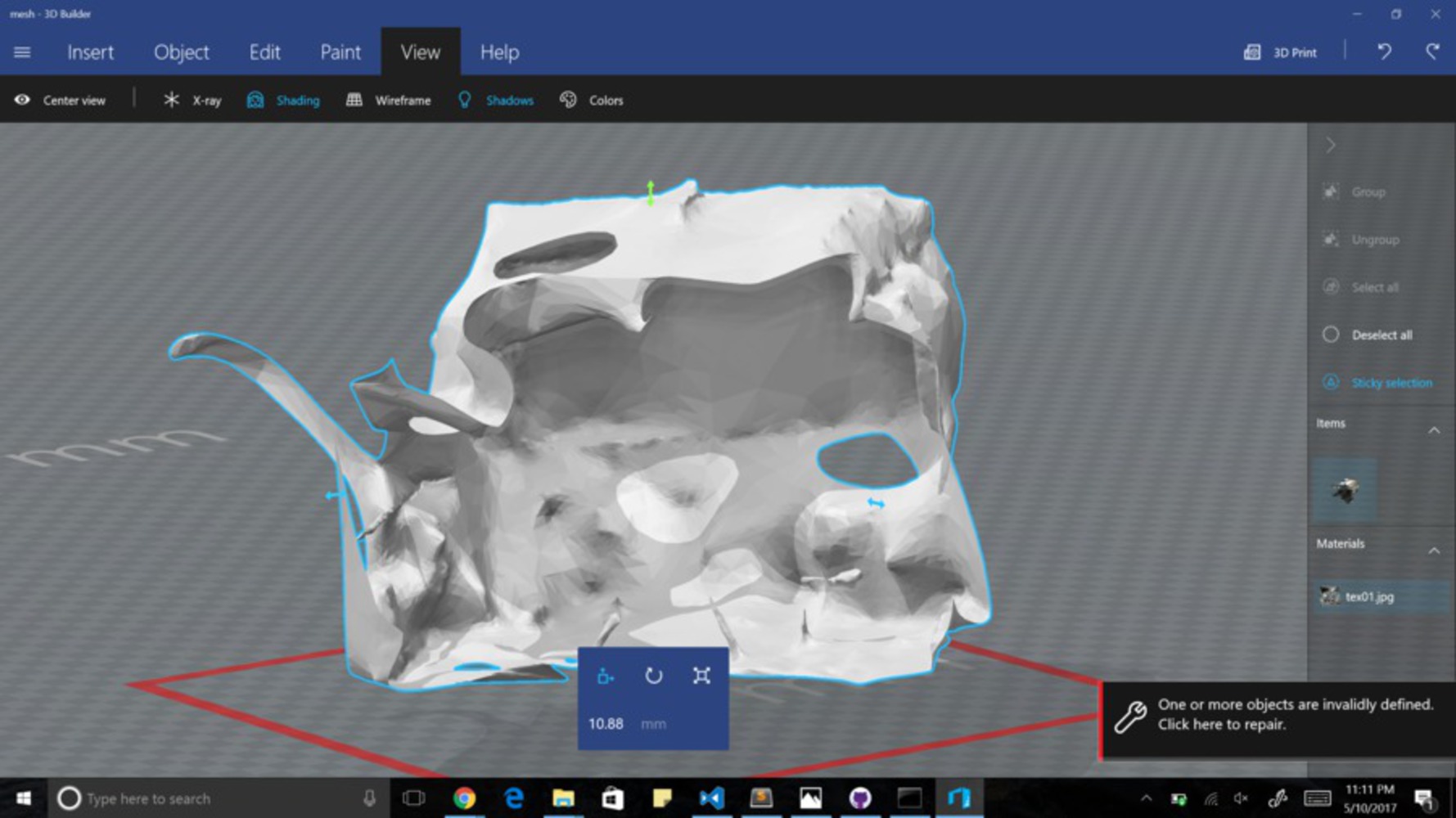
Creating A Rendering of the Room: Because efficient, accurate, readily-available object recognition does not currently exist, I have to recreate the room in an online rendering so that I can manually annotate the objects in a different language (and display these annotations in Augmented Reality). The technology to create a room rendering that is accurate is not readily available, so I tried doing it through photogrammetry and ReCap/ReMake. I used a Ricoh to take panoramic pictures of the room, used my code to change those panoramic pictures to 6 side-view pictures, and funneled those pictures into ReCap/ReMake to try to produce a rendering of the room.
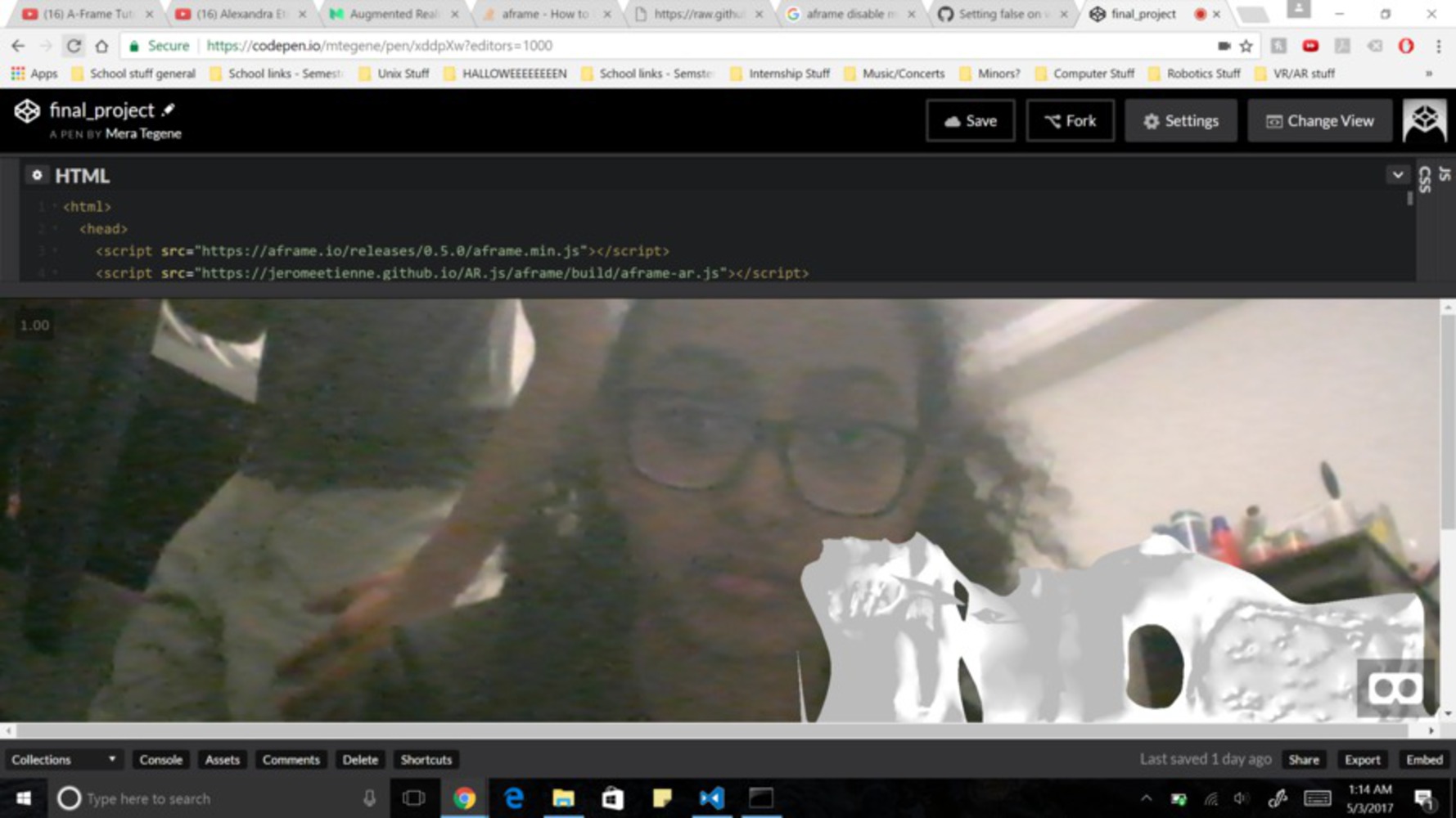
Displaying renderings in AR: I used AR.js and Aframe to display the rendering in Augmented Reality (AR). I hosted everything on glitch because I use WebSockets to communicate with the Vive Tracker which should be attached to the mobile device displaying everything. I need the Vive Tracker because mobile devices do not have accurate enough location tracking that I can easily use to figure out how the device is moving. By using the Vive Tracker, I can know where the mobile device is in the room and that allows me to know portion of the rendering I should be displaying (that's what the mover code does).
## This is the code that changed the panoramic picture into the respective 6 side
## pictures, so that I could funnel these pictures into ReMake/ReCap to from photos
## to 3D renderings of the room through photogrammetry
import math
import numpy as np
import cv2
import cv
def changing_uv_to_xyz(width, height):
X, Y = np.meshgrid(np.linspace(-1.0, 1.0, width), np.linspace(-1.0, 1.0, height))
Z = np.ones((width, height))
return (X, Y, Z)
def rotating(coords, dir, width, height):
X, Y, Z = coords
R = compute_rot(dir)
coords_rotated = R.dot([X.reshape(-1), Y.reshape(-1), Z.reshape(-1)])
X_mod = coords_rotated[0, :].reshape(width, height)
Y_mod = coords_rotated[1, :].reshape(width, height)
Z_mod = coords_rotated[2, :].reshape(width, height)
return (X_mod, Y_mod, Z_mod)
def compute_rot(dir):
if ("front" == dir): #f
return np.array([[-1.0, 0.0, 0.0],[0.0, 1.0, 0.0],[0.0, 0.0, 1.0]])
elif ("left" == dir): #l
return np.array([[1.0, 0.0, 0.0],[0.0, 0.0, 1.0],[0.0, 1.0, 0.0]])
elif ("back" == dir): #b
return np.array([[-1.0, 0.0, 0.0],[0.0, -1.0, 0.0],[0.0, 0.0, -1.0]])
elif ("right" == dir): #r
return np.array([[-1.0, 0.0, 0.0],[0.0, 0.0, -1.0],[0.0, 1.0, 0.0]])
#figure out the next 2
elif ("up" == dir): #u
return np.array([[0.0, 0.0, 1.0],[0.0, 1.0, 0.0],[1.0, 0.0, 0.0]])
else: #down
return np.array([[0.0, 0.0, -1.0],[0.0, 1.0, 0.0],[-1.0, 0.0, 0.0]])
def compute_trans (dir):
if(dir == "up"):
return 5 #y z
elif(dir == "down"):
return 6 #y z
elif(dir == "left"):
return 2 #x z
elif(dir == "right"):
return 4 #x z
elif(dir == "front"):
return 1 #identiy matrix
else: #(dir == "back")
return 3 #x z
def changing_into_theta_phi(coords_mod, src_width, src_height):
X, Y, Z = coords_mod
radius = (X ** 2.0 + Y ** 2.0) ** 0.5
thetas = np.arctan2(X, Y)
phis = np.arctan2(Z, radius)
#now adust the thetas and phis to like the actual sorce image size
thetas_shrunk = ((thetas / math.pi)) #now everything is from (-1.0, 1.0)
thetas_shrunk_shifted = thetas_shrunk + 1.0 #now everything is from (0.0, 2.0)
thetas_shrunk_some_more = thetas_shrunk_shifted * 0.5 #now everything is from (0.0, 1.0)
thetas_mod = thetas_shrunk_some_more * src_width
phis_shrunk = ((phis / math.pi)) #now everything is from (-0.5, 0.5)
phis_shrunk_shifted = phis_shrunk + 0.5 #now everything is from (0.0, 1.0)
phis_mod = phis_shrunk_shifted * src_height
return (thetas_mod, phis_mod)
if __name__ == '__main__':
source_images = [cv2.imread("C:\\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\Pic1.JPG"),
cv2.imread("C:\\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\Pic2.JPG"),
cv2.imread("C:\\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\Pic3.JPG"),
cv2.imread("C:\\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\Pic4.JPG"),
cv2.imread("C:\\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\Pic5.JPG"),
cv2.imread("C:\\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\Pic6.JPG"),
cv2.imread("C:\\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\Pic7.JPG"),
cv2.imread("C:\\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\Pic8.JPG")]
#This is where I stored the panoramic images that I used
dirs = ["front", "left", "back", "right", "up", "down"]
count = 1
for img in source_images:
for dir in dirs:
(X, Y, Z) = changing_uv_to_xyz(2048, 2048)
(X_mod, Y_mod, Z_mod) = rotating((X, Y, Z), dir, 2048, 2048)
(U, V) = changing_into_theta_phi((X_mod, Y_mod, Z_mod), 5376, 2688) ##5376, 2688
pic = cv2.remap(img, np.array(U, dtype=np.float32), np.array(V, dtype=np.float32), cv2.INTER_LINEAR)
cv2.imwrite("C:\Users\\Mitu\\Documents\\16457_project_stuff\\more_panos\\smaller_room_1\\pics\\pic" + str(count) + "_" + str(compute_trans(dir)) + ".jpg", pic)
#testing\\pics\\pic" + str(count) + "_" + str(compute_trans(dir)) + ".jpg", pic)
count = count + 1<!-- This is the code for making the AR work on you mobile device and make the rendering
appear. It access the git hub project that has all the necessary files I import (like
the rendering and the mover code).-->
<html>
<head>
<script src="https://aframe.io/releases/0.5.0/aframe.min.js"></script>
<script src="https://jeromeetienne.github.io/AR.js/aframe/build/aframe-ar.js"></script>
<script type="text/javascript" src="https://rawgit.com/mtegene/reality_computing_final_project/master/js/mover.js"></script>
</head>
<body>
<a-scene embedded artoolkit='sourceType: webcam;'>
<a-assets>
<a-asset-item id="mesh"
src="https://raw.githubusercontent.com/mtegene/reality_computing_final_project/master/renderings/mesh2.obj"></a-asset-item>
<a-asset-item id="texture" src="https://raw.githubusercontent.com/mtegene/reality_computing_final_project/master/renderings/tex2.mtl"></a-asset-item>
</a-assets>
<a-entity id="camparent" position="0 0 0" mover>
<a-camera id="camera" rotation="0 90 0" aframe-injected="" look-controls="enabled: false"></a-camera>
</a-entity>
<a-entity id="mesh_1" position="-3.5 -0.77 0" rotation="-76 64 23" obj-model="obj: #mesh"></a-entity>
</a-scene>
</body>
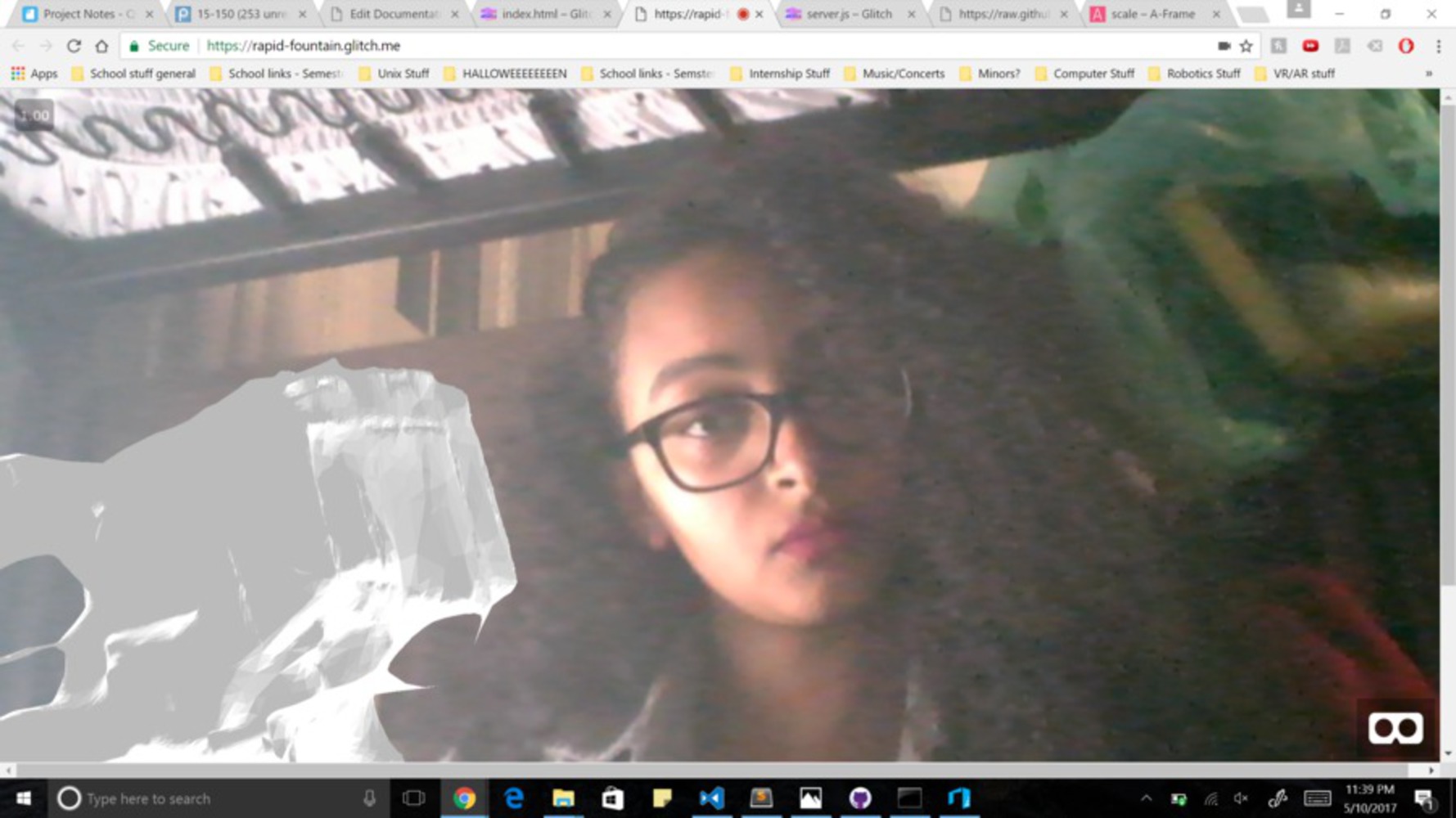
</html>I have to actually scale these renderings to accurately represent the portion of the room they are a rendering of. And after that I would have to annotate them.
(This is not too difficult of a task, just kind of tedious, so I have put it off because I want the rest of the project to work properly before doing this part.)
//code for mover component of the camera parent that is supposed to move the camera
//around according to the Vive Tracker (through a web socket)
//The WebSocket stuff is done by using Professor Pyry's code
AFRAME.registerComponent('mover', {
init: function() {
var socket = new WebSocket("wss://rapid-fountain.glitch.me/");
socket.onmessage = function (evt) {
var msg = JSON.parse(evt.data);
if (msg[0] === "broadcast")
{
var pos = (msg[2]).postion;
var dir = (msg[2]).quaternion;
this.el.setAttribute("position", {x: pos[0], y: pos[1], z: pos[2]});
var theObject3D = document.querySelector('#camparent').object3D;
theObject3D.quaternion = dir
}
};
socket.send(JSON.stringify(["register", "vive"]));
}
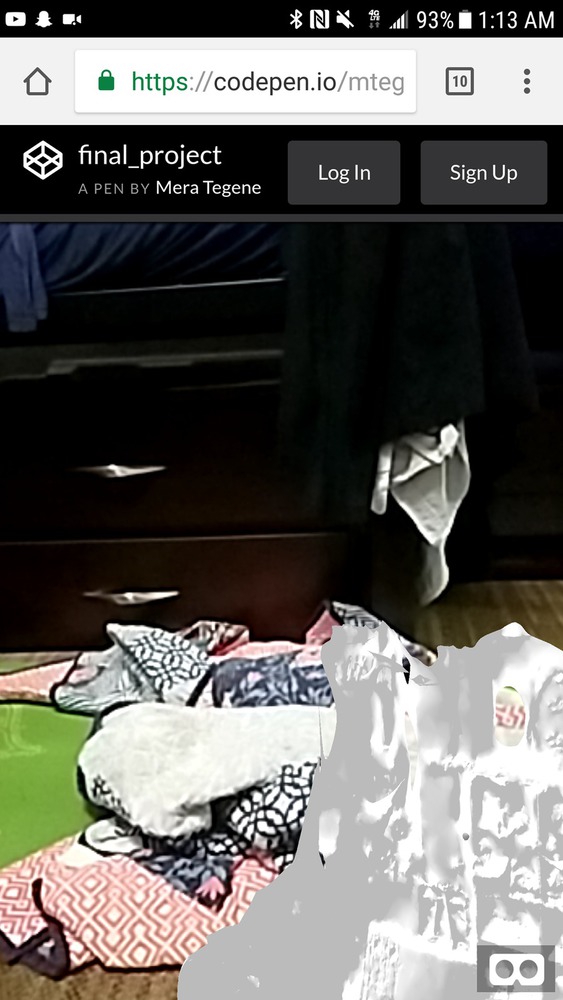
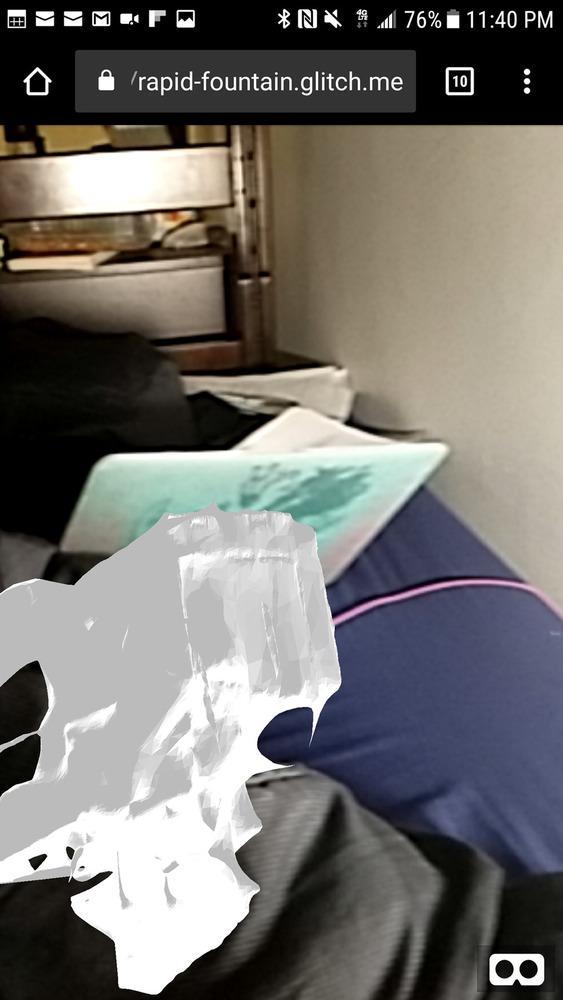
});https://rapid-fountain.glitch.me/
This is the link to the website. Run this on your mobile device with a Vive tracker attached.
https://github.com/mtegene/reality_computing_final_project
This is the link to the git hub project, where you can find the mover code and some of the renderings I made.
DISCLAIMER: project is still not done because I need to do the scaling and annotating, and more importantly, make sure the Vive Tracker's information is being correctly used to modify what is displayed.
I want to create an application that aids in language learning. Building your vocabulary is an important aspect of learning a new language, and I believe it would be helpful if common objects were annotated (using AR) in the language you are trying to learn. That is what my projects attempts to do.