Kinect Design System
Made by Luke Hottinger and hhou
Made by Luke Hottinger and hhou
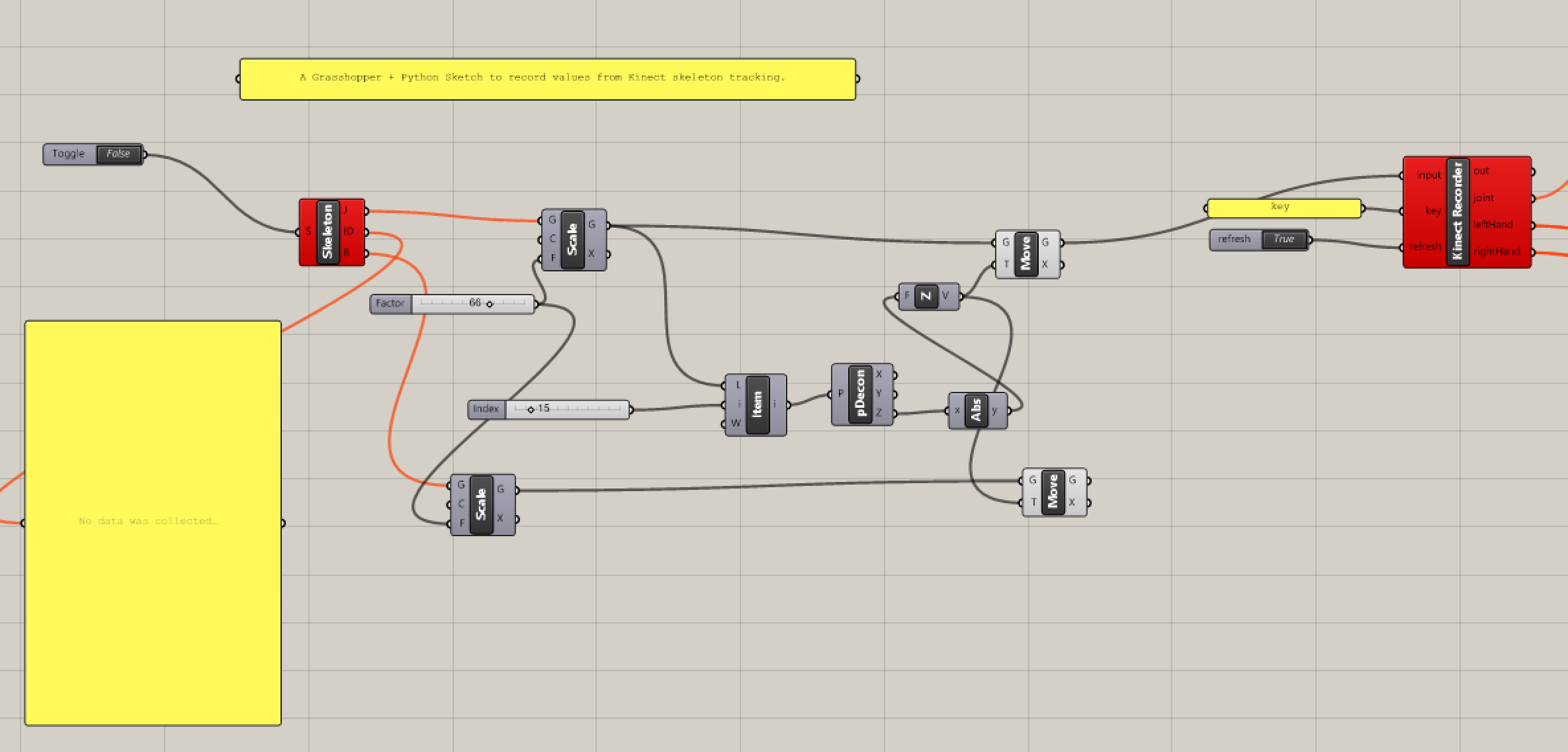
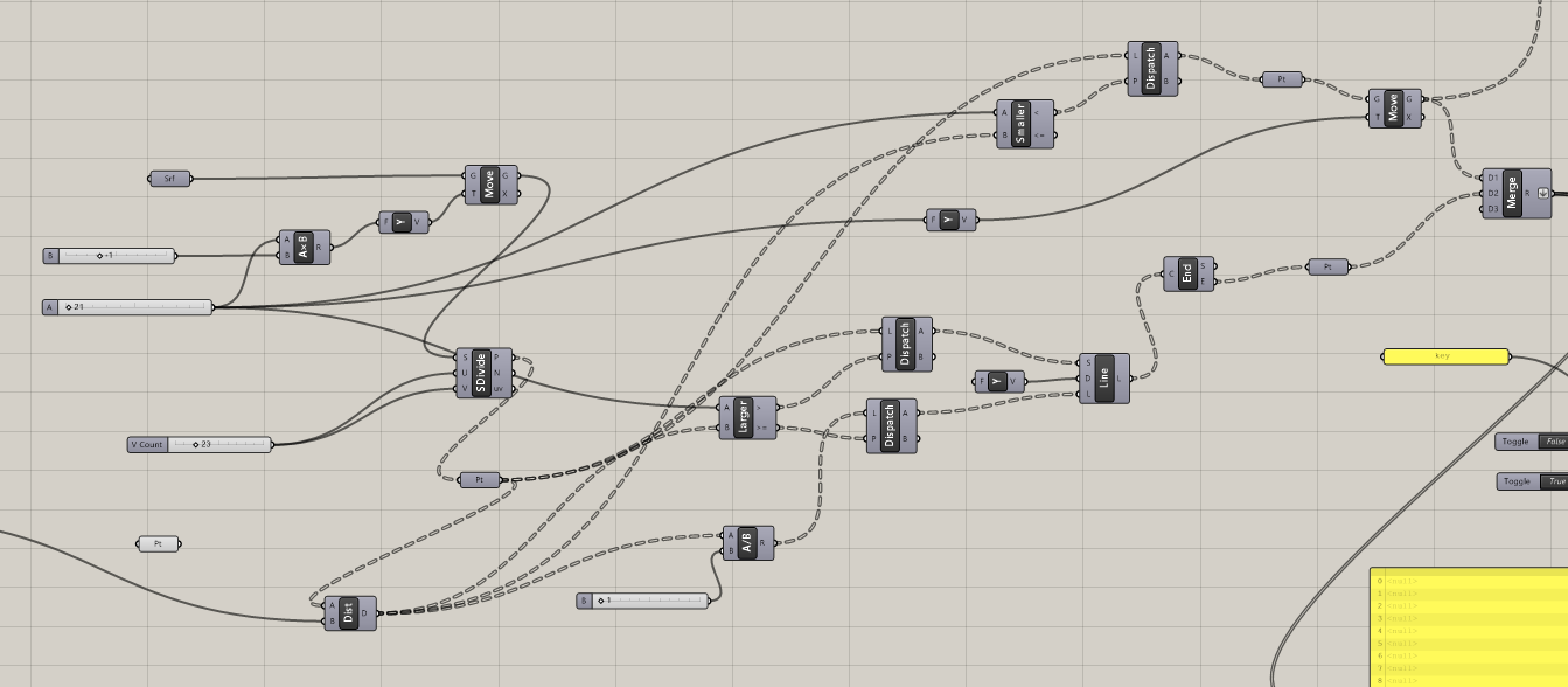
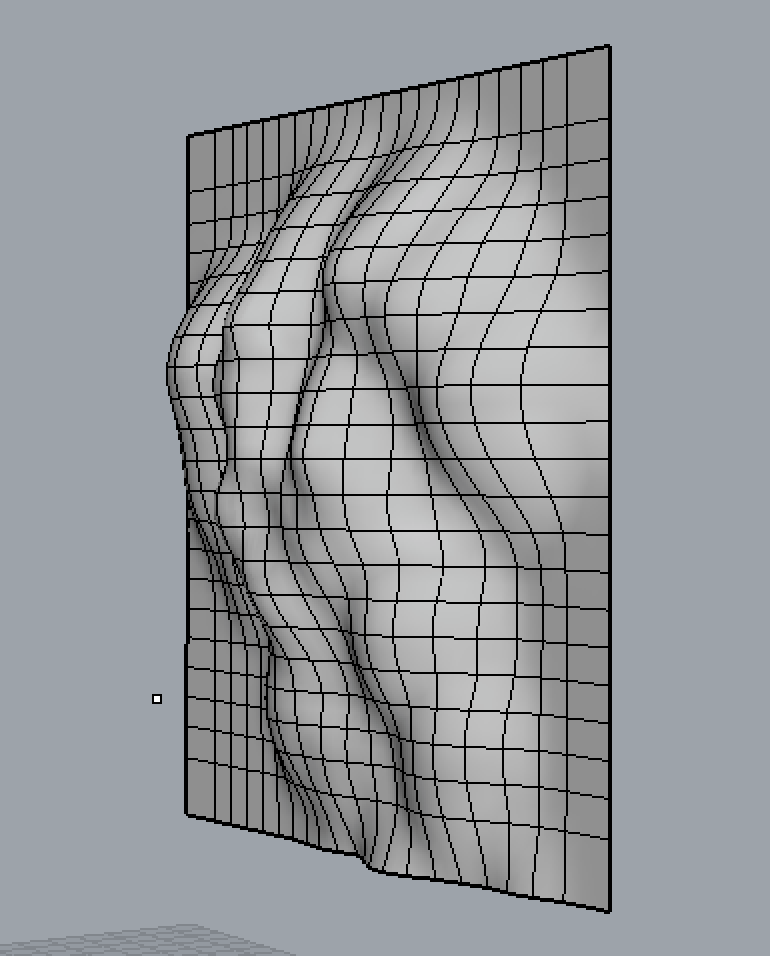
In this phase of the project, we aimed at creating a design system that allows you to shape a mesh through whole body interactions. By taking skeleton data from an Xbox Kinect, we were able transform body movements into mesh shaping movements in Rhino through Grasshopper. We focused on improving the user interaction with the system over our previous iteration by incorporating various suggestions we received from users
Created: May 11th, 2015
Human dexterous skill embodies a wealth of physical understanding which complements computer-based design and machine fabrication. This project-oriented course explores the duality between hand and...more
In this phase of the project, we aimed at creating a design system that allows you to shape a mesh through whole body interactions. By taking skeleton data from an Xbox Kinect, we were able transform body movements into mesh shaping movements in Rhino through Grasshopper.
We focused on improving the user interaction with the system over our previous iteration by incorporating various suggestions we received from users