For those looking for a ‘soulmate’, we offer a ‘palm-mate’ instead! Palmistry is the belief that one’s future is encoded within the palm of our hands. The length, depth and curvature of the crease lines within one’s hand tell of your prospects in love, money, career. Simply place your palm on the sensor and receive a printed ‘oracle’ symbol indicating your fortune. Find someone else with the same symbol to find your compatible ‘palm-mate’!
Created: March 31st, 2023
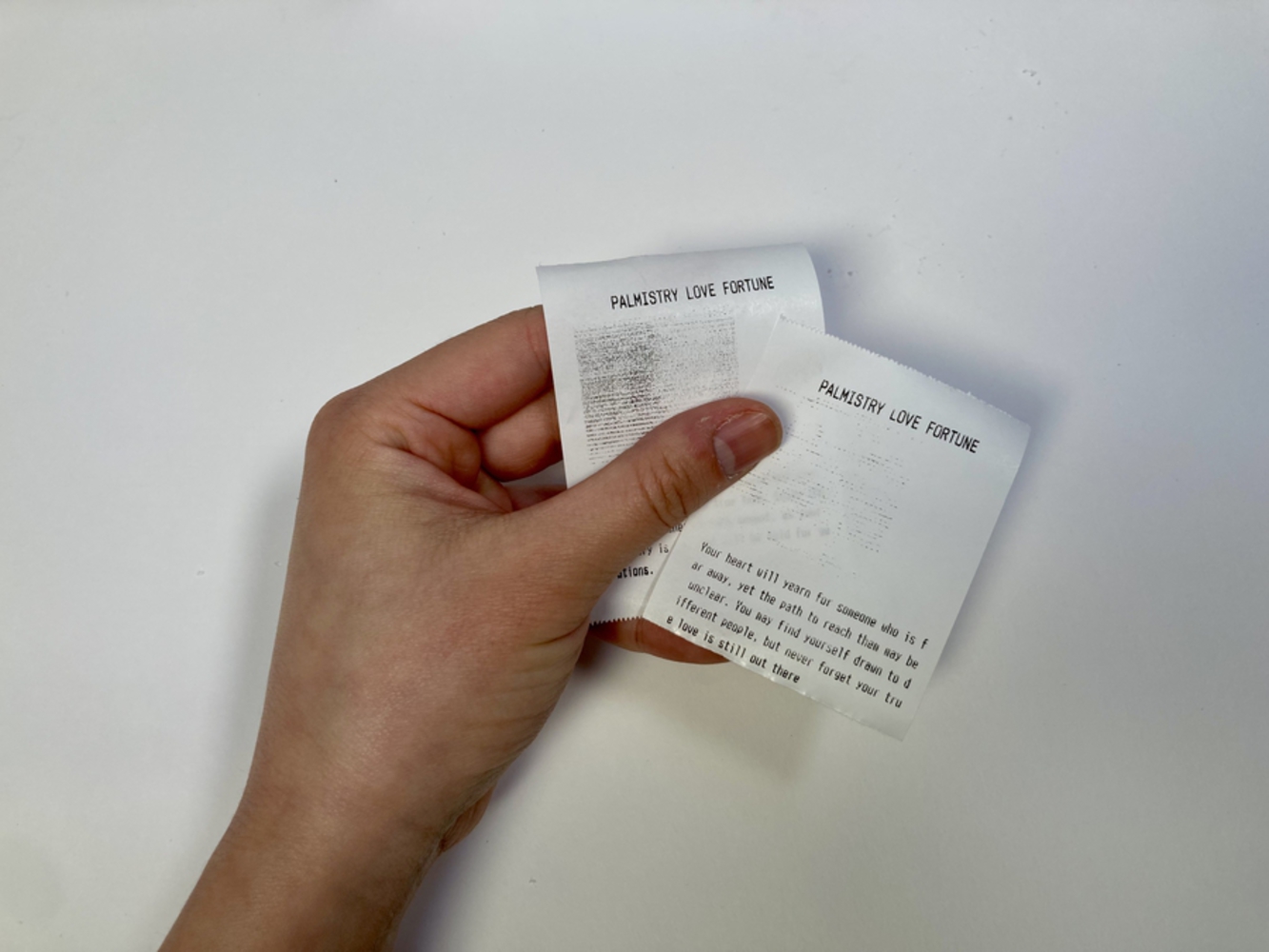
For our project, we decided to create a “palm reader" that would read the length of the user's ‘love line’ (i.e. the uppermost palm crease line) and print an ‘oracle symbol’ and a short piece of text describing the user’s love fortune. With the fortune slip in hand, the user would then look for their ‘palm-mate’ who had received the same ‘oracle symbol’.

(System Diagram)

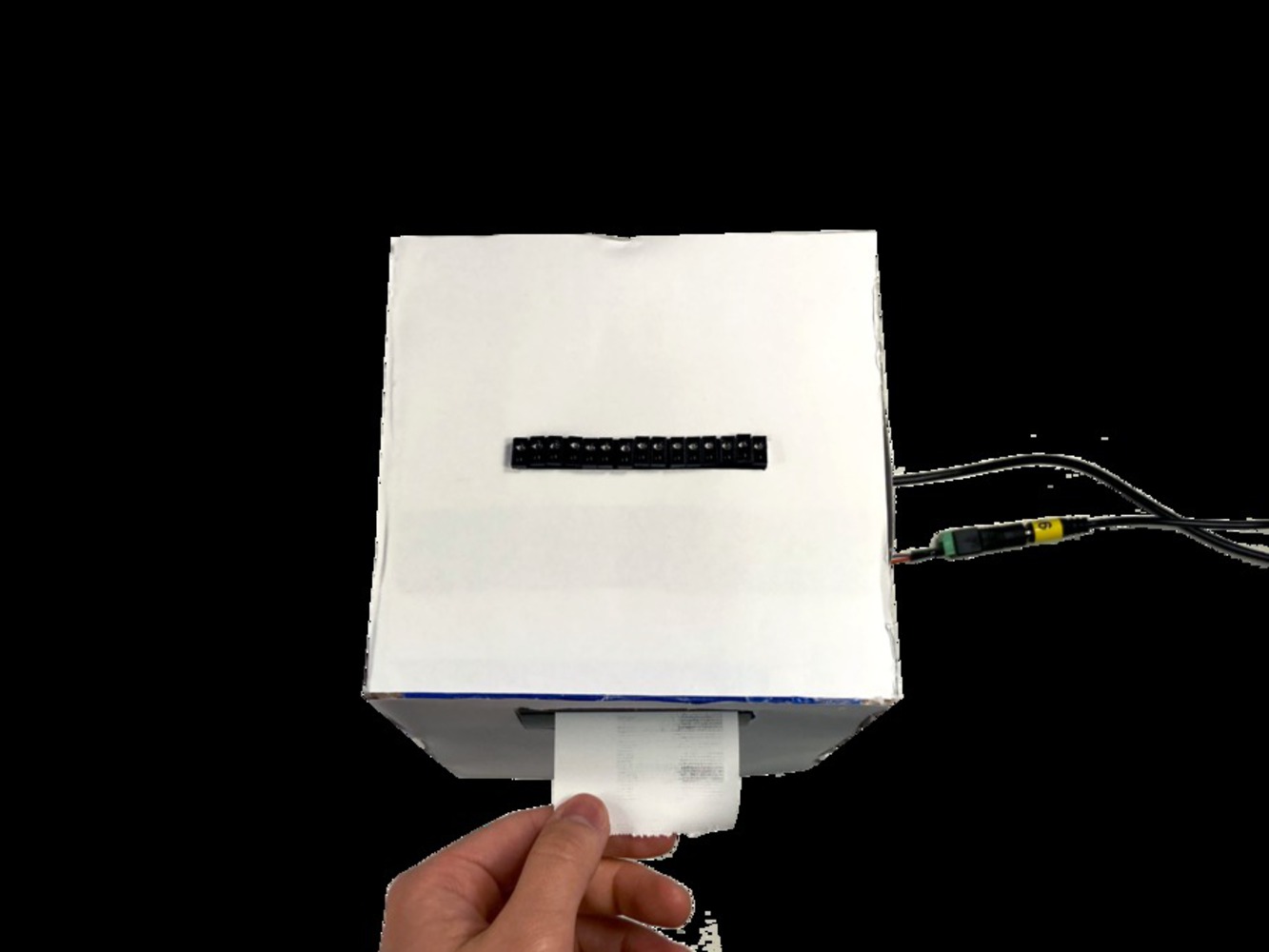
(Final Working Prototype)
On the top, we have a line of IR proximity sensors which would read values from the person’s palm. Each of the IR sensors are soldered onto a protoboard which connects each sensor to a power line, ground line, one of two CD4051 multiplexers, and 220Ω and 5.6kΩ resistors respectively. On the side is the thermal printer which would print the ‘love fortune’. This is connected to the Arduino Nano 33 BLE and an external 9V power supply. Due to the physical complexity of the project, installation into the physical housing was split into two compartments. The IR sensors and protoboard and the thermal printer sit in a smaller top level. All of the wires thread through a hole down to a lower compartment that houses two breadboards - one for the multiplexers, the other for the Arduino BLE.

(Before Assembly)

(Internal housing structure)
In order to parse the values read by the IR sensors, we had to split them up and connect them to two CD4051 multiplexers. In the code this required writing our own ‘readMux’ function that would iterate through each of the pins on the multiplexer and compile the values from both multiplexers into an array.
Additionally, we use ML twice. First, we pass the array of values from the IR sensors into an Edge Impulse model that returns a prediction of the current user’s palm length, and a reading of ‘good’, ‘bad’ or ‘ambiguous’. Depending on the reading (i.e. ‘good’, ‘bad’, ‘ambiguous’), one of 9 ‘oracle images’ is chosen. The reading is then sent as a prompt to OpenAI via the OpenAI API, asking it to generate a ‘good love fortune’, ‘ambiguous love fortune’ or ‘bad love fortune’ within 100 words. This is printed below the image.
Bill of Materials:

Working Code:
Process

Phase 1 - Collecting Data / Deciding Sensors for Input
Due to the small size and scope of the built-in sensor in the Arduino Nano 33 BLE Sense, we decided to use external sensors to widen the range of data collection.
We started off trying to use TCS34725 Color Sensors. While we were able to follow the pinout and successfully interface with one sensor, we ran into difficulties when trying to connect more. Not only was each sensor quite big, but also each had a fixed I2C address, meaning all the data was coming in under ‘one sensor’. In order to communicate with each sensor individually, we would need to use a multiplexer.
After meeting with Robert Zacharias, we took his advice and switched from using the larger color sensors to smaller individual IR sensors with the intention of building a 'primitive camera' out of an array of them. As we had little experience in the realm of physical computing, we took this work session to figure out:

- how to read the circuit diagram - in particular using ground and power lines and finding the right resistors
- how to interface with the IR sensors via Arduino and checking how different colors/ materials led to different values within the Serial Monitor
We started out by wiring a single IR sensor to the Arduino to see the difference in values read between dark and light colors, following the iDeaTe circuit diagram and tutorial.

Source: https://courses.ideate.cmu.edu/60-223/s2023/tutorials/IR-proximity-sensor
After testing each sensor to ensure it was functioning, we arranged 15 IR sensors in a line and soldered them to a protoboard, so we could record more data in order to determine the ‘length’ of the palm line. This part required a lot of discipline and diligence, not only was it Clover’s first time soldering, but also because of the large quantity and density of components. Each IR sensor had to be connected to 2 separate resistors, 1 Arduino/ Multiplexer Analog pin, a power source, and a ground line, totalling to 5 * 15 = 75 unique connections overall. To help legibility, Clover kept each resistor (220Ω on the left, 5.6kΩ on the right) and each power and ground connection on separate sides. The wires were color coded accordingly:
- Red (ground)
- Black (power)
- Blue (Multiplexer/ Arduino Analog pin)
Additionally, wire length was kept short to prevent tangles. This entire process took around 4 hours in the Digital Fabrication lab, as we took our time double checking at each step, and checking each sensor after it was soldered. We wanted to make sure we weren’t making major mistakes as we were aware that they would be difficult and even more time consuming to fix.
The wire endings on the other side were also trimmed down to ensure no accidental connections or shorting.


One difficulty that we encountered was after we had soldered all these sensors, we realized that there were 15 sensors that needed their own unique Analog pin, but there were only 8 Analog pins on the Arduino Nano. This meant we would need to use Multiplexers to increase the number of Analog pins in order to parse the data from each sensor. In another meeting, Robert Zacharias pointed us in the direction of the CD4051 which would act as a 8 pin expander. Since we had 15 sensors, we would need to use two. Here, the main difficulty was understanding how to call the 8 different channels via an array of 3 ints in the code:
Open Questions and Next Steps:
There are many different areas of palmistry we have yet to explore. For instance, there are the other palm lines, such as the Head Line, Life Line, Marriage Line, Fate Line and Sun Line. There are also broader areas of the palm which are each associated with a planet, which could tie into some concepts from astrology.


Furthermore, Golan Levin proposed a really interesting idea we would love to follow up on which gave a ‘Missed Connections’ - type spin to the project. He really liked the idea of a ‘palm-mate’/ soulmate and that despite the information given by the fortune teller, there was no guarantee you would find someone with a matching symbol. He proposed that we should install the machine at a bus stop next to a bulletin board. The machine would print 2 copies: one for the user to keep and carry around, the other for the user to pin up on the bulletin board, waiting for its future matching ‘partner’. This narrative of ‘fate’ ties really well into the core concept of palmistry which believes that our fates are encoded in our hands. Moreover, it was ‘spooky’ because there were so many uncertainties - you never really knew if there was ever going to be a ‘palm-mate’, whether they would ever respond to your posting, or whether they actually were ‘compatible’ with you, yet you couldn’t help but hope.
Share this Project
Focused on
About
For those looking for a ‘soulmate’, we offer a ‘palm-mate’ instead! Palmistry is the belief that one’s future is encoded within the palm of our hands. The length, depth and curvature of the crease lines within one’s hand tell of your prospects in love, money, career. Simply place your palm on the sensor and receive a printed ‘oracle’ symbol indicating your fortune. Find someone else with the same symbol to find your compatible ‘palm-mate’!