Skills Dev IV: Jody - Motors & Movement
Made by jmadala
Made by jmadala
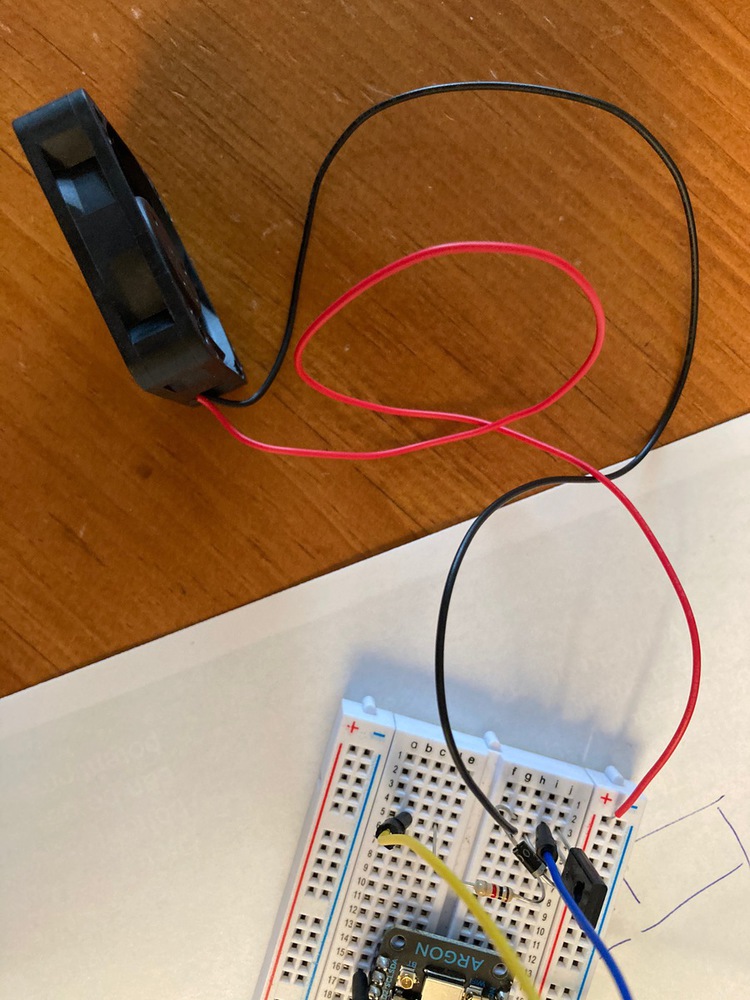
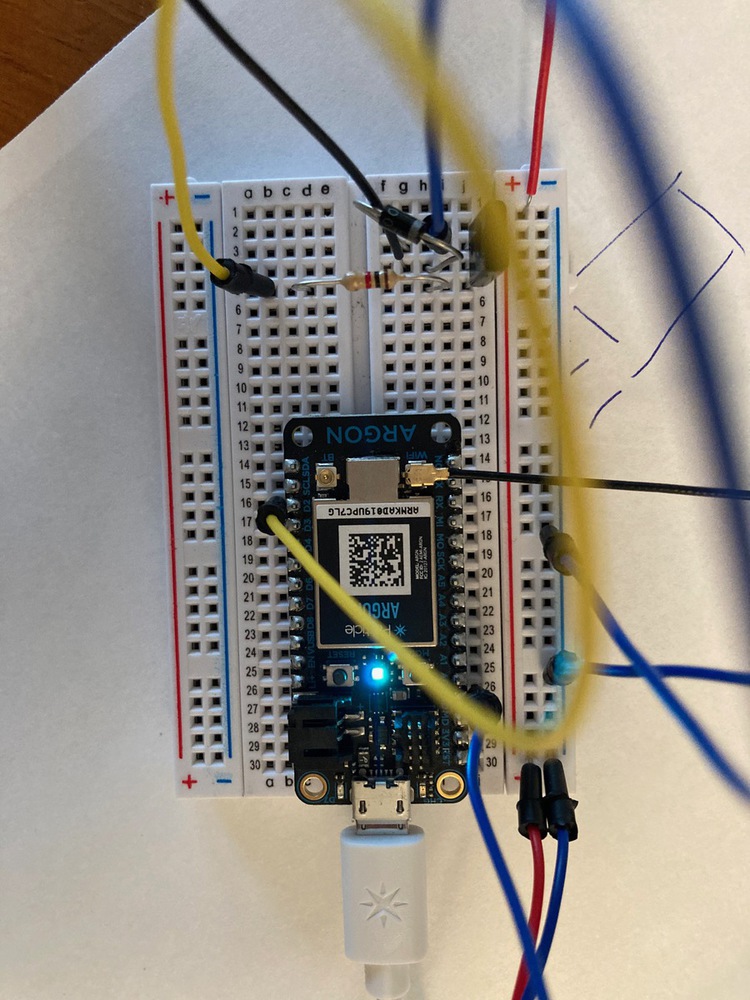
Create an interaction using a motor like the servo, fan, or solenoid that can communicate with me. Ideally, the motor would create the notification generated from an online source using IFTTT, but since the exercise said we did not have to hook up to live data I instead tested this using the Particle cloud.
Created: December 5th, 2020
Create an interaction using a motor like the servo, fan, or solenoid that can communicate with me. Ideally, the motor would create the notification generated from an online source using IFTTT, but since the exercise said we did not have to hook up to live data I instead tested this using the Particle cloud.